মেটাল কাটিং মেশিনের অক্জিলিয়ারী ড্রাইভের জন্য বৈদ্যুতিক মোটর নির্বাচন
 মেশিন টুলে সহায়ক ড্রাইভ (ক্যালিপার, হেড প্যাড, ক্রস আর্মস ইত্যাদির জন্য দ্রুত ড্রাইভ) সাধারণত স্বল্প সময়ের লোড মোডে কাজ করে। এই ধরনের সময়কালের বৈদ্যুতিক ড্রাইভের অপারেশনের মোড, যেখানে বৈদ্যুতিক ড্রাইভে অন্তর্ভুক্ত সমস্ত ডিভাইসের তাপমাত্রা অপারেশন চলাকালীন একটি স্থির মান পৌঁছায় না এবং বিরতির সময় পরিবেষ্টিত তাপমাত্রায় হ্রাস পায়, তাকে স্বল্প-মেয়াদী বলা হয়।
মেশিন টুলে সহায়ক ড্রাইভ (ক্যালিপার, হেড প্যাড, ক্রস আর্মস ইত্যাদির জন্য দ্রুত ড্রাইভ) সাধারণত স্বল্প সময়ের লোড মোডে কাজ করে। এই ধরনের সময়কালের বৈদ্যুতিক ড্রাইভের অপারেশনের মোড, যেখানে বৈদ্যুতিক ড্রাইভে অন্তর্ভুক্ত সমস্ত ডিভাইসের তাপমাত্রা অপারেশন চলাকালীন একটি স্থির মান পৌঁছায় না এবং বিরতির সময় পরিবেষ্টিত তাপমাত্রায় হ্রাস পায়, তাকে স্বল্প-মেয়াদী বলা হয়।
মেটাল কাটিং মেশিনে অক্জিলিয়ারী ড্রাইভের অপারেটিং সময় সাধারণত ছোট হয়; এটি 5 - 15 সেকেন্ডের বেশি নয় এবং শুধুমাত্র ভারী মেশিনের জন্য এটি 1 - 1.5 মিনিটে পৌঁছায়। এই সময়ে (t < 0.1T) অনুমতিযোগ্য সীমার মধ্যে একটি ওভারলোড সহ, বৈদ্যুতিক মোটর এমনকি স্বাভাবিক অতিরিক্ত গরম পর্যন্ত গরম করার সময় পায় না। এই ক্ষেত্রে বৈদ্যুতিক মোটরের রেট করা শক্তি ওভারলোড অবস্থার দ্বারা নির্ধারিত হয়।
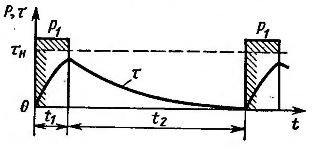
ভাত। 1. স্বল্পমেয়াদী অপারেশন জন্য লোড বক্ররেখা
অক্জিলিয়ারী ড্রাইভের অপারেশন চলাকালীন Mc প্রতিরোধের মুহূর্তটি মূলত ঘর্ষণ শক্তি দ্বারা তৈরি হয়, এবং সেইজন্য এই ড্রাইভগুলি, মূল গতির ড্রাইভগুলির বিপরীতে, একটি উল্লেখযোগ্য স্টার্টিং টর্কের প্রয়োজন হয়।
একটি অনুভূমিকভাবে চলমান মেশিন উপাদান সরানোর সময় ঘর্ষণ শক্তি কাটিয়ে ওঠার শক্তি ব্যবহার করে:

যেখানে Ftp — ঘর্ষণ বল, N; v — বেগ, m/s; G — সরানো হচ্ছে ইউনিটের মাধ্যাকর্ষণ (ওজন), N; μ — গতির ঘর্ষণ সহগ।
মোটর শ্যাফ্ট পাওয়ার P = Ptr /η,
যেখানে η — গ. P. D. ট্রান্সমিশন, সাধারণত η = ০.১ — ০.২।
বিবেচিত মোডে অপারেশন চলাকালীন বৈদ্যুতিক মোটর গরম করা নগণ্য। অতএব, এটির অনুমোদিত ওভারলোড ব্যবহার করার সুপারিশ করা হয়।
রেটেড পাওয়ার Pn = Ptr /(λη),
যেখানে λ — অনুমোদিত ওভারলোডের সহগ।
মোটামুটিভাবে, এটি বিবেচনা করা যেতে পারে যে ইঞ্জিনটির কার্যকারী অংশের বৈশিষ্ট্যটি স্পষ্ট। তারপর ওভারলোড অপারেশনে মোটরের কৌণিক বেগ
ωλ = ωО (1 — λсн),
যেখানে, ωО = (πнО)/30- বৈদ্যুতিক মোটরের সিঙ্ক্রোনাস কৌণিক গতি।
Pn = Ptr /(λη) সূত্রটি ব্যবহার করে, মোটরের ওভারলোড টর্ক খুঁজুন
ইঞ্জিন শুরু করার শুরুতে প্রতিরোধের মুহূর্তটি এটির অপারেশন চলাকালীন সময়ের চেয়ে বেশি। এই মুহূর্তে
যেখানে μО — বিশ্রামে ঘর্ষণ সহগ।
মেশিনের অক্জিলিয়ারী ড্রাইভের বৈদ্যুতিক মোটর নির্বাচন করার পদ্ধতি
প্রথমে, Pn = Ptr /(λη) সূত্রটি ব্যবহার করে ক্যাটালগ থেকে একটি বৈদ্যুতিক মোটর নির্বাচন করা হয়, যার জন্য শুরুর টর্ক Mnach তারপর নির্ধারিত হয়। সূত্র দ্বারা Mso মুহূর্ত গণনা করুন এবং Mnach মুহূর্তটির সাথে তুলনা করুন।যদি 0.85 Mnig> Mso হয়, তাহলে নির্বাচিত মোটরটি সহায়ক ড্রাইভের জন্য উপযুক্ত।
মেশিন ইউনিট বাঁক এবং উত্তোলনের জন্য ড্রাইভগুলি একইভাবে গণনা করা হয়, শুধুমাত্র পরবর্তী ক্ষেত্রে প্রধান লোডটি প্রায়শই সরানো ইউনিটের মাধ্যাকর্ষণ শক্তি (ওজন) দ্বারা তৈরি হয়।
দ্রুত ওয়ার্কপিসে টুলটির কাছে যাওয়ার জন্য সর্বোত্তম গতি বেছে নেওয়ার জন্য এটি বিশেষ গুরুত্ব বহন করে। টুলের কাছে যাওয়ার সময়, উচ্চ-গতির আন্দোলনটি কাটিয়া গতিতে একটি ধীর গতির দ্বারা প্রতিস্থাপিত হয়। এই গতি পরিবর্তন ঘটে যখন টুলটি অংশ থেকে কিছুটা দূরে থাকে, অন্যথায় টুলটি উচ্চ গতিতে অংশে আঘাত করে এবং ভেঙে যায়।
এক গতি থেকে অন্য গতিতে রূপান্তর কিছুটা সময় নেয়। এই সময়ে, বৈদ্যুতিক সরঞ্জামগুলি সক্রিয় করা হয় এবং উচ্চ গতিতে চলাচল অব্যাহত থাকে। ভোল্টেজের ওঠানামা এবং অন্যান্য এলোমেলো কারণগুলির প্রভাবের কারণে সরঞ্জামগুলির প্রতিক্রিয়া সময় পরিবর্তিত হয়।
কাইনেমেটিক চেইনে গিয়ারের উপযুক্ত নির্বাচন দ্বারা সর্বোত্তম গতি প্রদান করা হয়। রাস্তার চূড়ান্ত অংশের গতি ধীরে ধীরে বা মসৃণ স্বয়ংক্রিয় হ্রাস দ্বারা সময়ের আরও হ্রাস সম্ভব, যা উচ্চতর প্রাথমিক গতি গ্রহণ করা সম্ভব করে।