লিফটের বৈদ্যুতিক সরঞ্জাম
 একটি লিফট হল একটি সাইক্লিক লিফটিং মেশিন যা মানুষ এবং পণ্য উল্লম্ব উত্তোলনের জন্য ডিজাইন করা হয়েছে। অ্যাপয়েন্টমেন্টের মাধ্যমে, লিফটগুলি যাত্রী, পণ্যসম্ভার-যাত্রী, হাসপাতাল, কার্গোতে বিভক্ত।
একটি লিফট হল একটি সাইক্লিক লিফটিং মেশিন যা মানুষ এবং পণ্য উল্লম্ব উত্তোলনের জন্য ডিজাইন করা হয়েছে। অ্যাপয়েন্টমেন্টের মাধ্যমে, লিফটগুলি যাত্রী, পণ্যসম্ভার-যাত্রী, হাসপাতাল, কার্গোতে বিভক্ত।
গাড়ির গতির উপর নির্ভর করে, লিফটগুলিকে নিম্ন-গতি (0.71 মিটার / সেকেন্ড পর্যন্ত), উচ্চ-গতি (1 থেকে 1.6 মিটার / সেকেন্ড পর্যন্ত), উচ্চ-গতি (2 থেকে 4 মিটার / সেকেন্ড পর্যন্ত) এবং উচ্চ-গতি (4 — 10 মি / সেকেন্ড) ... যাত্রী লিফটের লোড ক্ষমতা 320 থেকে 1600 কেজি, মালবাহী লিফট - 160-5000 কেজি থেকে। 1.6 মিটার / সেকেন্ড পর্যন্ত গতিতে, বৈদ্যুতিক মোটরটি একটি গিয়ারবক্সের মাধ্যমে ট্র্যাকশন বিমের সাথে সংযুক্ত থাকে, যদি গতি বেশি হয় তবে গিয়ারলেস বৈদ্যুতিক ড্রাইভ ব্যবহার করা হয়।

যাত্রী এবং মালবাহী লিফটের জন্য বিভিন্ন ধরণের ডিজাইনের বিকল্পগুলির সাথে, তাদের জন্য প্রধান ডিভাইসগুলি হল উত্তোলন, দড়ি, গাড়ি, কাউন্টারওয়েট, যান্ত্রিক ব্রেক এবং নিয়ন্ত্রণ সরঞ্জাম। আধুনিক লিফটে কাউন্টারওয়েট সাসপেনশন সিস্টেম এবং কাউন্টারওয়েট দড়ি রয়েছে।

কেবিনটি উল্লম্ব রেল বরাবর চলে।কেবিন দড়ি থেকে স্থগিত করা হয় যা টোয়িং তারের চারপাশে এবং বৈদ্যুতিক উইঞ্চ ড্রাইভের কপিকলগুলিকে গাইড করে। দড়ির শেষে একটি কাউন্টারওয়েট রয়েছে যা গাইড বরাবর চলে। কাউন্টারওয়েট ভর কেবিন ভরের সমষ্টি এবং (0.42 — 0.5) লোড ভরের সমান (অথবা সম্ভাব্য কেবিনের লোডের অর্ধেক)।
লিফট ড্রাইভ
এলিভেটর এবং মালবাহী লিফটগুলিতে, চলাচলের গতি, বিল্ডিংয়ের মেঝের সংখ্যা এবং প্রয়োজনীয় ব্রেকিং নির্ভুলতার উপর নির্ভর করে বৈদ্যুতিক ড্রাইভের প্রকারগুলি নির্বাচন করা হয়। নিম্নলিখিত বৈদ্যুতিক ড্রাইভগুলি বর্তমানে ব্যবহার করা হচ্ছে:
ক) 17 তলা পর্যন্ত বিল্ডিংয়ের জন্য, 320, 400 কেজি লোড ক্ষমতা সহ 0.7 থেকে 1.4 মি / সেকেন্ড গতির কম-গতি এবং উচ্চ-গতির লিফট ব্যবহার করা হয়। এই লিফটগুলি কাঠবিড়ালী খাঁচায় রটার সহ একটি অ্যাসিঙ্ক্রোনাস দ্বি-গতির বৈদ্যুতিক মোটর সহ একটি বৈদ্যুতিক ড্রাইভ ব্যবহার করে,
খ) 1.6 মি / সেকেন্ড গতির উচ্চ-গতির যাত্রীবাহী লিফটের জন্য, 25 তলা পর্যন্ত বিল্ডিংয়ের উদ্দেশ্যে, একটি দ্বি-গতির অ্যাসিঙ্ক্রোনাস মোটর (TRN-ADD) সহ থাইরিস্টর ভোল্টেজ রেগুলেটর সিস্টেম (TRN) অনুসারে একটি বৈদ্যুতিক ড্রাইভ। ব্যবহৃত হয়.

একটি সামঞ্জস্যযোগ্য বৈদ্যুতিক ড্রাইভের উপস্থিতি ত্বরণ এবং হ্রাস প্রক্রিয়াগুলির উচ্চ মসৃণতা, মেঝেতে থামার উচ্চ নির্ভুলতা (20 মিমি পর্যন্ত) এবং থামার আগে হ্রাস গতি সহ একটি অংশের অনুপস্থিতি নিশ্চিত করে। মোটরটির দ্বিতীয় উইন্ডিং ওভারহোলের সময় কম গতি অর্জন করতে ব্যবহৃত হয়,
গ) উচ্চ-গতি এবং উচ্চ-গতির লিফটের জন্য, থাইরিস্টর কনভার্টার-টিপি-ডি-এর মোটর সিস্টেম অনুসারে ধ্রুবক বৈদ্যুতিক ড্রাইভ এবং ফ্রিকোয়েন্সি কনভার্টার-শর্ট-সার্কিট অ্যাসিঙ্ক্রোনাস বৈদ্যুতিক মোটর GGCH-AD এর সিস্টেম অনুসারে বিকল্প কারেন্ট ব্যবহার করা হয়।
লিফট টাইপ ULMP-25-16 থেকে Thyristor বৈদ্যুতিক ড্রাইভ
বৈদ্যুতিক ড্রাইভের পাওয়ার সাপ্লাই (চিত্র 1) একটি বিপরীতমুখী থাইরিস্টর ভোল্টেজ নিয়ন্ত্রক UZ (TRN) দ্বারা স্টার্ট-আপ এবং ইউনিফর্ম মুভমেন্টে এবং একটি পৃথক সংশোধনকারী দ্বারা সঞ্চালিত হয় যা একটি একক-ফেজ ব্রিজ সার্কিট UZ1 অনুসারে একত্রিত হয়। গতিশীল ব্রেকিংয়ের সময় স্টেটর উইন্ডিং।
সিস্টেমটি কাঠবিড়ালি-খাঁচা ইন্ডাকশন মোটরের ঘূর্ণন গতির প্যারামেট্রিক ফেজ নিয়ন্ত্রণ প্রদান করে। স্বয়ংক্রিয় নিয়ন্ত্রণ ব্যবস্থাটি KR1816VB031 ধরণের একটি একক-চিপ মাইক্রোকম্পিউটারে তৈরি করা হয়, যা একটি দ্বি-গতির অ্যাসিঙ্ক্রোনাস বৈদ্যুতিক মোটরের ঘূর্ণন গতির সরাসরি ডিজিটাল নিয়ন্ত্রণ করে।
স্বয়ংক্রিয় নিয়ন্ত্রণ ব্যবস্থা সেট গতি বজায় রাখার উচ্চ নির্ভুলতা নিশ্চিত করে এবং প্রয়োজনীয় ফ্লোরের স্তরে সরাসরি সেট পয়েন্টে কম গতি সহ একটি বিভাগ ছাড়াই থামে। মোটরের দ্বিতীয় উইন্ডিং শুধুমাত্র ওভারহোলের সময় চালু করা হয়।
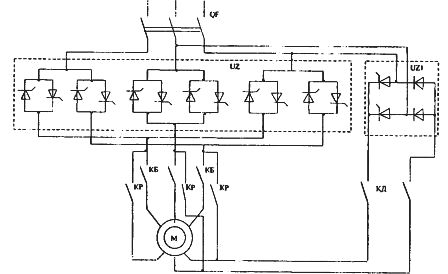
ভাত। 1. লিফটের থাইরিস্টর বৈদ্যুতিক ড্রাইভের স্কিম
ব্রেক solenoids
লিফটের উত্তোলন প্রক্রিয়া শর্ট-স্ট্রোক এবং শর্ট-স্ট্রোক সরাসরি বর্তমান ইলেক্ট্রোম্যাগনেট সহ বিশেষ ব্রেকিং ডিভাইস দিয়ে সজ্জিত, যা একটি সংশোধনকারীর মাধ্যমে 220 বা 380 V নেটওয়ার্কের সাথে সংযুক্ত থাকে।
লিফট নিয়ন্ত্রণ ডিভাইস
গতি নিয়ন্ত্রণ সার্কিট স্যুইচ করার জন্য ডিজাইন করা মেঝে সুইচ. তারা গাড়ির অবস্থান নিবন্ধন করে, স্বয়ংক্রিয়ভাবে চলাচলের দিক নির্বাচন করে («উপর» বা «নিচে») এবং ব্রেক করার সময় বৈদ্যুতিক ড্রাইভ বন্ধ করার জন্য একটি আদেশ দেয়।কাঠামোগতভাবে, এগুলি হল থ্রি-পজিশন (1-0-2) তিন-পয়েন্ট লিভার সুইচ (মোশন কন্ট্রোল ডিভাইস) যেগুলি চলমান (লিভারে) থেকে স্থির (অন-বডি) পরিচিতি রয়েছে।
ফ্লোর সুইচগুলি মেঝে স্তরে শ্যাফ্টে মাউন্ট করা হয় এবং ক্যাবের মধ্যে একটি ছাঁচযুক্ত শাখা রয়েছে যা মেঝে সুইচ লিভারে কাজ করে।
যখন কেবিন লিভার ঘুরিয়ে "উপরে" সরে যায়, তখন নির্দিষ্ট পরিচিতির একটি গ্রুপ বন্ধ হয়ে যায়, এবং "নিচে" - অন্যটি। যখন গাড়িটি মেঝে স্তরে থাকে, মেঝে সুইচটি নিরপেক্ষ অবস্থানে থাকে «O» এবং নির্দিষ্ট পরিচিতিগুলি খোলা থাকে।

স্পিড সুইচগুলি গাড়ি থামানোর আগে গতি কমানোর জন্য একটি আবেগ দেওয়ার জন্য ডিজাইন করা হয়েছে। এগুলি দুটি গতি কার্যকর করার সাথে বৈদ্যুতিক ড্রাইভ সহ উচ্চ-গতির লিফটগুলিতে ব্যবহৃত হয়। তারা মেঝে সুইচ নীতির উপর নির্মিত হয়, কিন্তু একটি ভিন্ন নকশা আছে। স্পিড সুইচগুলি মাইন শ্যাফটে 0.5 থেকে 0.6 মিটার দূরত্বে মেঝে থেকে উপরে এবং নীচে সম্পূর্ণ সেট হিসাবে ইনস্টল করা হয়।
লিভার সুইচগুলি নিয়ন্ত্রিত মালবাহী লিফট পরিচালনা করার জন্য ডিজাইন করা হয়েছে। কাঠামোগতভাবে, এগুলি কেবিনে মাউন্ট করা নিরপেক্ষ অবস্থানে ("শীর্ষ" -0- "নিচে") হ্যান্ডেলের স্ব-রিটার্ন সহ তিন-পজিশন লিভার সুইচ। হ্যান্ডেল বাঁক দ্বারা, আন্দোলনের দিক নির্বাচন করা হয়, যা নির্দিষ্ট পরিচিতিগুলির একটি জোড়া বন্ধ করে অর্জন করা হয়। হ্যান্ডেলটি মুক্তি পেলে, পরিচিতিগুলি খোলে এবং মোটর বন্ধ হয়ে যায় (বন্ধ হয়ে যায়)। সুইচগুলি ক্যাবের শেষ অবস্থানে সীমা সুইচ হিসাবে একযোগে ব্যবহৃত হয়। খনির খাদে বিশেষ গাইডের রোলারে লিভারের ক্রিয়া দ্বারা এটি অর্জন করা হয়।
উচ্চ-গতির লিফটে ব্যবহারের জন্য ডিজাইন করা ইন্ডাকটিভ সেন্সর। বিকল্প এবং সংশোধন করা কারেন্টের জন্য এই ধরনের সেন্সরগুলির চিত্রটি চিত্রে দেখানো হয়েছে। 2.
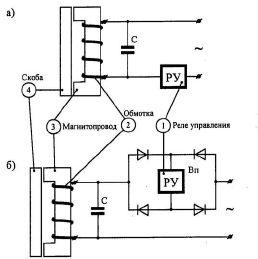
ভাত। 2. বিকল্প (a) এবং সংশোধন করা (b) বর্তমান প্রবর্তক সেন্সরগুলির পরিকল্পিত চিত্র
স্টিল 3 দিয়ে তৈরি একটি U-আকৃতির স্তরিত চৌম্বকীয় সার্কিট খনি শ্যাফ্টে ইনস্টল করা আছে এবং কেবিনে একটি স্টিলের বন্ধনী 4 রয়েছে, যা একটি চৌম্বকীয় শান্ট। চৌম্বকীয় সার্কিটে উইন্ডিং 2 সহ একটি কয়েল রয়েছে, যার সাথে কন্ট্রোল রিলে 1 সরাসরি বা একটি ভিপি সংশোধনকারীর মাধ্যমে সংযুক্ত থাকে। যখন ক্ল্যাম্প ছেড়ে যায় (চৌম্বকীয় সার্কিটটি খোলে), তখন কয়েলের প্রবর্তক প্রতিরোধ ক্ষমতা ছোট হয়, যা নিয়ন্ত্রণ রিলেটির অপারেশন নিশ্চিত করবে। যদি ইস্পাত বন্ধনীটি চৌম্বকীয় সার্কিটকে ওভারল্যাপ করে, তবে কুণ্ডলীটির প্রবর্তক প্রতিরোধের তীব্রতা বেড়ে যায় এবং রিলেটি মুক্তি পায়।
কয়েলের সমান্তরালে ক্যাপাসিট্যান্স সি অন্তর্ভুক্ত করার মাধ্যমে কন্ট্রোল রিলে পরিচালনার নির্ভরযোগ্যতা এবং স্বচ্ছতা নিশ্চিত করা হয়, যা স্রোতের অনুরণনের কাছাকাছি একটি মোড পাওয়ার শর্ত থেকে নির্বাচিত হয়। নিয়ন্ত্রণ রিলেকে পাওয়ার জন্য একটি সংশোধনকারীর ব্যবহার রিলের চৌম্বকীয় সিস্টেমের অপারেশনের নির্ভরযোগ্যতা বাড়ায়।
উপরন্তু, হারমেটিক যোগাযোগ ডিভাইস (রিড সুইচ) ব্যাপকভাবে ভ্রমণ সেন্সর ব্যবহার করা হয়. ইন্ডাকটিভ সেন্সর ব্যবহার ফ্লোর সুইচ এবং স্পিড সুইচের এই ধরনের অসুবিধাগুলি দূর করে যেমন যোগাযোগের ডিভাইসগুলির অপারেশন থেকে উদ্ভূত শব্দ এবং রেডিও হস্তক্ষেপ।
ম্যাগনেটিক লেয়ারিং হল কেবিনে ইনস্টল করা একটি ইলেক্ট্রোম্যাগনেটিক ডিভাইস এবং খনির দরজার তালাগুলির অপারেশন নিয়ন্ত্রণ করে। চৌম্বক শাখা লিমিটার শাখা ইলেক্ট্রোম্যাগনেটের আর্মেচারের সাথে সংযুক্ত।যখন ক্যাব মেঝেতে থাকে, তখন শাখা ইলেক্ট্রোম্যাগনেট ডি-এয়ারেটেড হয়, স্প্রিং-লোডেড ডিটেন্ট খনি দরজার তালা খুলে দেয়, এটি খোলার অনুমতি দেয়।
নড়াচড়া করার সময়, শাখার ইলেক্ট্রোম্যাগনেট শক্তিযুক্ত হয় - ল্যাচটি চালু করা হয়, যা দরজা খোলা নিষিদ্ধ করে। এই ধরনের লকগুলি ম্যানুয়াল শ্যাফ্ট দরজা অপারেশন সহ পুরানো ডিজাইনের (বা আধুনিকীকৃত) লিফটে ব্যবহৃত হয়।

লিফটের অটোমেশন
লিফট এবং উত্তোলনের অপারেশনের মধ্যে প্রধান পার্থক্য হ'ল তাদের বহু-অবস্থানের অবস্থান, যা এই সত্যে প্রকাশ করা হয় যে প্রক্রিয়াগুলি প্রচুর সংখ্যক নির্দিষ্ট অবস্থান দখল করতে পারে। অতএব, প্রতিটি স্টপের পরে পরবর্তী পদক্ষেপটি বেছে নেওয়ার যৌক্তিক সমস্যা সমাধান করা প্রয়োজন। এই সমস্যার সমাধান বর্তমানে লজিক চিপস এবং মাইক্রোপ্রসেসর ব্যবহার করে প্রয়োগ করা হয়েছে। লিফট কন্ট্রোল স্কিমের জন্য নিম্নলিখিত কাজগুলি সেট করা হয়েছে: খাদে গাড়ির অবস্থান নিয়ন্ত্রণ, চলাচলের দিক স্বয়ংক্রিয় নির্বাচন, থামার শুরুর সময় নির্ধারণ, মেঝেতে গাড়ির সঠিক থামানো, স্বয়ংক্রিয় খোলা এবং দরজা বন্ধ করা এবং বৈদ্যুতিক ড্রাইভ এবং লিফটের সুরক্ষা।
যে কমান্ড সংকেতগুলি গাড়ির মোশন প্রোগ্রাম সেট করে তা দুটি প্রকারে বিভক্ত: গাড়ি থেকে আসা "অর্ডার" এবং ল্যান্ডিং প্যাড থেকে আসা "কল"। কমান্ডগুলি যথাক্রমে ককপিট এবং ফ্লোর এলাকায় অবস্থিত বোতামগুলির মাধ্যমে দেওয়া হয়। কমান্ডের প্রতিক্রিয়া এবং তাদের প্রক্রিয়াকরণের পদ্ধতির উপর নির্ভর করে, পৃথক এবং যৌথ নিয়ন্ত্রণ স্কিমগুলি পৃথক হয়।একটি পৃথক নিয়ন্ত্রণ নীতির সাথে, সার্কিট শুধুমাত্র একটি কমান্ড উপলব্ধি করে এবং কার্যকর করে এবং এটি কার্যকর করার সময় অন্যান্য আদেশ এবং কলগুলিতে সাড়া দেয় না।
এই স্কিমটি বাস্তবায়নের জন্য সবচেয়ে সহজ, কিন্তু লিফটের সম্ভাব্য বৈশিষ্ট্যগুলিকে সীমিত করে এবং তাই এটি শুধুমাত্র যাত্রীদের অপেক্ষাকৃত কম প্রবাহ সহ নয় তলা পর্যন্ত আবাসিক ভবনগুলিতে লিফটের জন্য ব্যবহৃত হয়। সমষ্টিগত নিয়ন্ত্রণের নীতির সাথে, সার্কিট একই সাথে বেশ কয়েকটি কমান্ড গ্রহণ করে এবং একটি নির্দিষ্ট ক্রমানুসারে সেগুলিকে কার্যকর করে, সাধারণত ফ্লোরের ক্রম অনুসারে।

লিফট নিয়ন্ত্রণ ব্যবস্থার ভিত্তি হল মেঝে ঘড়ি পরিমাপ। ঘড়ির অধ্যয়ন একটি পেন্ডুলাম হতে পারে, যখন ফিক্সিং দুটি দিকে বাহিত হয়, নিচ থেকে উপরে এবং উপরে নীচে, এবং এক দিক, উদাহরণস্বরূপ, শুধুমাত্র উপরে থেকে নীচে। পেন্ডুলাম সুইং আরো প্রায়ই ব্যবহৃত হয়।