মাইক্রোপ্রসেসর সিস্টেম
 প্রায় সমস্ত বৈদ্যুতিক ডিভাইসে মাইক্রোপ্রসেসর সিস্টেমের ব্যবহার আধুনিক সমাজের প্রযুক্তিগত অবকাঠামোর সবচেয়ে গুরুত্বপূর্ণ বৈশিষ্ট্য। বিদ্যুৎ, শিল্প, পরিবহন, যোগাযোগ ব্যবস্থা কম্পিউটার নিয়ন্ত্রণ ব্যবস্থার উপর অত্যন্ত নির্ভরশীল। মাইক্রোপ্রসেসর সিস্টেমগুলি পরিমাপ যন্ত্র, বৈদ্যুতিক ডিভাইস, আলো ইনস্টলেশন ইত্যাদিতে এমবেড করা হয়।
প্রায় সমস্ত বৈদ্যুতিক ডিভাইসে মাইক্রোপ্রসেসর সিস্টেমের ব্যবহার আধুনিক সমাজের প্রযুক্তিগত অবকাঠামোর সবচেয়ে গুরুত্বপূর্ণ বৈশিষ্ট্য। বিদ্যুৎ, শিল্প, পরিবহন, যোগাযোগ ব্যবস্থা কম্পিউটার নিয়ন্ত্রণ ব্যবস্থার উপর অত্যন্ত নির্ভরশীল। মাইক্রোপ্রসেসর সিস্টেমগুলি পরিমাপ যন্ত্র, বৈদ্যুতিক ডিভাইস, আলো ইনস্টলেশন ইত্যাদিতে এমবেড করা হয়।
এই সমস্ত বৈদ্যুতিক প্রকৌশলীকে অন্তত মাইক্রোপ্রসেসর প্রযুক্তির মূল বিষয়গুলি জানতে বাধ্য করে।
মাইক্রোপ্রসেসর সিস্টেমগুলি তথ্য প্রক্রিয়াকরণ স্বয়ংক্রিয় এবং বিভিন্ন প্রক্রিয়া নিয়ন্ত্রণ করার জন্য ডিজাইন করা হয়েছে।
"মাইক্রোপ্রসেসর সিস্টেম" শব্দটি খুবই বিস্তৃত এবং এতে "ইলেক্ট্রনিক কম্পিউটিং মেশিন (ECM)", "কন্ট্রোল কম্পিউটার", "কম্পিউটার" এবং অন্যান্য ধারণা অন্তর্ভুক্ত রয়েছে।
মাইক্রোপ্রসেসর সিস্টেমে হার্ডওয়্যার বা ইংরেজিতে — হার্ডওয়্যার এবং সফ্টওয়্যার (সফ্টওয়্যার) — সফ্টওয়্যার অন্তর্ভুক্ত।
ডিজিটাল তথ্য
মাইক্রোপ্রসেসর সিস্টেম ডিজিটাল তথ্যের সাথে কাজ করে, যা সংখ্যাসূচক কোডের একটি সিরিজ।
যেকোন মাইক্রোপ্রসেসর সিস্টেমের মূলে একটি মাইক্রোপ্রসেসর থাকে যেটি শুধুমাত্র বাইনারি সংখ্যা গ্রহণ করতে পারে (0s এবং 1s দ্বারা গঠিত)।বাইনারি সংখ্যা বাইনারি সংখ্যা পদ্ধতি ব্যবহার করে লেখা হয়। উদাহরণস্বরূপ, দৈনন্দিন জীবনে আমরা একটি দশমিক সংখ্যা পদ্ধতি ব্যবহার করি যা সংখ্যা লিখতে দশটি অক্ষর বা অঙ্ক ব্যবহার করে, 0,1,2,3,4,5,6,7,8,9। তদনুসারে, বাইনারি সিস্টেমে কেবল দুটি এ জাতীয় প্রতীক (বা অঙ্ক) রয়েছে - 0 এবং 1।
এটা বুঝতে হবে যে সংখ্যা পদ্ধতি শুধুমাত্র সংখ্যা লেখার নিয়ম, এবং পদ্ধতির ধরন পছন্দটি ব্যবহারের সহজতার দ্বারা নির্ধারিত হবে। একটি বাইনারি সিস্টেমের পছন্দ তার সরলতার কারণে, যার অর্থ ডিজিটাল ডিভাইসগুলির নির্ভরযোগ্যতা এবং তাদের প্রযুক্তিগত বাস্তবায়নের সহজতা।
ডিজিটাল তথ্য পরিমাপের একক বিবেচনা করুন:
একটি বিট (ইংরেজি "বাইনারী ডিজিট" - বাইনারি ডিজিট থেকে) শুধুমাত্র দুটি মান নেয়: 0 বা 1। আপনি যৌক্তিক মান «হ্যাঁ» বা «না» এনকোড করতে পারেন, রাষ্ট্র «চালু» বা «বন্ধ», রাষ্ট্র « খোলা» «বা» বন্ধ «ইত্যাদি।
আট বিটের একটি গ্রুপকে বাইট বলা হয়, উদাহরণস্বরূপ 10010111। একটি বাইট আপনাকে 256 মান এনকোড করতে দেয়: 00000000 — 0, 11111111 — 255।
বিট হল তথ্যের ক্ষুদ্রতম একক।
বাইট - তথ্য প্রক্রিয়াকরণের ক্ষুদ্রতম একক। বাইট - একটি মেশিন শব্দের অংশ, সাধারণত 8 বিট সমন্বিত এবং একটি কম্পিউটারে এটির স্টোরেজ, ট্রান্সমিশন এবং প্রক্রিয়াকরণের সময় তথ্যের পরিমাণের জন্য একটি ইউনিট হিসাবে ব্যবহৃত হয়। একটি বাইট অক্ষর, সিলেবল এবং বিশেষ অক্ষর (সাধারণত সমস্ত 8 বিট দখল করে) বা দশমিক সংখ্যা (1 বাইটে প্রতিটি 2 সংখ্যা) প্রতিনিধিত্ব করে।
দুটি সংলগ্ন বাইটকে একটি শব্দ, 4 বাইট একটি দ্বিগুণ শব্দ, 8 বাইট একটি কোয়াড শব্দ বলা হয়।
আমাদের ঘিরে থাকা প্রায় সব তথ্যই এনালগ। অতএব, তথ্য প্রক্রিয়াকরণের জন্য প্রসেসরে প্রবেশ করার আগে, এটি একটি ADC (অ্যানালগ-টু-ডিজিটাল রূপান্তরকারী) ব্যবহার করে রূপান্তরিত হয়।উপরন্তু, তথ্য একটি নির্দিষ্ট বিন্যাসে এনকোড করা হয় এবং ডিজিটাল, যৌক্তিক, পাঠ্য (প্রতীকী), গ্রাফিক, ভিডিও ইত্যাদি হতে পারে।
উদাহরণস্বরূপ, ASCII কোডের একটি টেবিল (ইংরেজি আমেরিকান স্ট্যান্ডার্ড কোড ফর ইনফরমেশন ইন্টারচেঞ্জ থেকে) পাঠ্য তথ্য এনকোড করতে ব্যবহৃত হয়। একটি অক্ষর এক বাইটে লেখা হয়, যা 256 মান নিতে পারে। গ্রাফিকাল তথ্য বিন্দুতে বিভক্ত (পিক্সেল), এবং প্রতিটি বিন্দুর রঙ এবং অবস্থান অনুভূমিকভাবে এবং উল্লম্বভাবে কোড করা হয়।
বাইনারি এবং দশমিক সিস্টেম ছাড়াও, MS একটি হেক্সাডেসিমেল সিস্টেম ব্যবহার করে যেখানে সংখ্যা লিখতে 0 ... 9 এবং A ... F চিহ্নগুলি ব্যবহার করা হয়। এটির ব্যবহার এই কারণে যে একটি বাইট একটি দুটি দ্বারা বর্ণনা করা হয়েছে। -সংখ্যার হেক্সাডেসিমেল সংখ্যা, যা সাংখ্যিক কোড রেকর্ডকে ব্যাপকভাবে হ্রাস করে এবং এটিকে আরও পঠনযোগ্য করে তোলে (11111111 — FF)।
সারণী 1 - বিভিন্ন সংখ্যা পদ্ধতিতে সংখ্যা লেখা
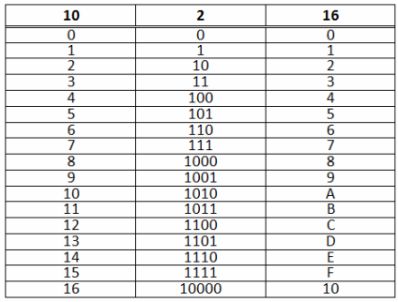
সংখ্যার মান নির্ধারণ করতে (উদাহরণস্বরূপ, বিভিন্ন নম্বর সিস্টেমের জন্য 100 নম্বরের মান 42, 10010, 25616 হতে পারে), সংখ্যার শেষে নম্বর সিস্টেম নির্দেশ করে একটি ল্যাটিন অক্ষর যোগ করুন: বাইনারি সংখ্যার জন্য অক্ষর b, হেক্সাডেসিমেল সংখ্যার জন্য — h, দশমিক সংখ্যার জন্য — d. একটি অতিরিক্ত পদবি ছাড়া একটি সংখ্যা দশমিক হিসাবে বিবেচিত হয়।
সংখ্যাগুলিকে একটি সিস্টেম থেকে অন্য সিস্টেমে রূপান্তর করা এবং সংখ্যার সাথে মৌলিক গাণিতিক এবং যৌক্তিক ক্রিয়াকলাপগুলি আপনাকে একটি ইঞ্জিনিয়ারিং ক্যালকুলেটর (উইন্ডোজ অপারেটিং সিস্টেমের মানক অ্যাপ্লিকেশন) তৈরি করতে দেয়।
একটি মাইক্রোপ্রসেসর সিস্টেমের গঠন
মাইক্রোপ্রসেসর সিস্টেম একটি মাইক্রোপ্রসেসর (প্রসেসর) এর উপর ভিত্তি করে যা তথ্য প্রক্রিয়াকরণ এবং নিয়ন্ত্রণ কার্য সম্পাদন করে। মাইক্রোপ্রসেসর সিস্টেম তৈরি করা বাকি ডিভাইসগুলি প্রসেসরকে কাজ করতে সাহায্য করে।
একটি মাইক্রোপ্রসেসর সিস্টেম তৈরির জন্য বাধ্যতামূলক ডিভাইসগুলি হল ইনপুট/আউটপুট পোর্ট এবং আংশিকভাবে মেমরি... ইনপুট - আউটপুট পোর্টগুলি প্রক্রিয়াকরণ বা নিয়ন্ত্রণ কর্মের ফলাফল প্রক্রিয়াকরণ এবং আউটপুট করার জন্য তথ্য প্রদান করে প্রসেসরকে বাইরের বিশ্বের সাথে সংযুক্ত করে। বোতাম (কীবোর্ড), বিভিন্ন সেন্সর ইনপুট পোর্টের সাথে সংযুক্ত থাকে; আউটপুট পোর্টে — যে ডিভাইসগুলি বৈদ্যুতিক নিয়ন্ত্রণের অনুমতি দেয়: নির্দেশক, প্রদর্শন, কন্টাক্টর, সোলেনয়েড ভালভ, বৈদ্যুতিক মোটর ইত্যাদি।
প্রসেসরের কাজ করার জন্য প্রয়োজনীয় একটি প্রোগ্রাম (বা প্রোগ্রামের সেট) সংরক্ষণ করার জন্য প্রাথমিকভাবে মেমরির প্রয়োজন হয়। একটি প্রোগ্রাম হল কমান্ডের একটি ক্রম যা প্রসেসর বোঝে, একজন মানুষের দ্বারা লিখিত (সাধারণত একজন প্রোগ্রামার)।
একটি মাইক্রোপ্রসেসর সিস্টেমের গঠন চিত্র 1 এ দেখানো হয়েছে। একটি সরলীকৃত আকারে, প্রসেসরে একটি গাণিতিক লজিক ইউনিট (ALU) থাকে যা ডিজিটাল তথ্য প্রক্রিয়া করে এবং একটি কন্ট্রোল ইউনিট (CU) থাকে।
মেমরিতে সাধারণত শুধুমাত্র-পঠনযোগ্য মেমরি (ROM) অন্তর্ভুক্ত থাকে, যা অ-উদ্বায়ী এবং দীর্ঘমেয়াদী তথ্য সংরক্ষণের জন্য (যেমন, প্রোগ্রাম), এবং র্যান্ডম-অ্যাক্সেস মেমরি (RAM), অস্থায়ী ডেটা স্টোরেজের উদ্দেশ্যে।

চিত্র 1 — মাইক্রোপ্রসেসর সিস্টেমের গঠন
প্রসেসর, পোর্ট এবং মেমরি বাসের মাধ্যমে একে অপরের সাথে যোগাযোগ করে। একটি বাস হল তারের একটি সেট যা কার্যকরীভাবে একত্রিত হয়। সিস্টেম বাসের একটি একক সেটকে ইন্ট্রাসিস্টেম বাস বলা হয়, যার মধ্যে রয়েছে:
-
ডিবি ডেটা বাস (ডেটা বাস), যার মাধ্যমে প্রসেসর, মেমরি এবং পোর্টগুলির মধ্যে ডেটা আদান-প্রদান করা হয়;
-
ঠিকানা বাস AB (অ্যাড্রেস বাস), মেমরি সেল এবং প্রসেসরের পোর্টগুলিকে অ্যাড্রেস করতে ব্যবহৃত হয়;
-
কন্ট্রোল বাস সিবি (কন্ট্রোল বাস), লাইনের একটি সেট যা প্রসেসর থেকে বাহ্যিক ডিভাইসে বিভিন্ন নিয়ন্ত্রণ সংকেত প্রেরণ করে এবং এর বিপরীতে।
মাইক্রোপ্রসেসর
মাইক্রোপ্রসেসর - একটি সফ্টওয়্যার-নিয়ন্ত্রিত ডিভাইস যা ডিজিটাল তথ্য প্রক্রিয়াকরণ এবং এই প্রক্রিয়াকরণের প্রক্রিয়াকে নিয়ন্ত্রণ করার জন্য ডিজাইন করা হয়েছে, একটি (বা একাধিক) সমন্বিত সার্কিটের আকারে তৈরি করা হয়েছে উচ্চ মাত্রার ইলেকট্রনিক উপাদানগুলির একীকরণের সাথে।
একটি মাইক্রোপ্রসেসর অনেক সংখ্যক প্যারামিটার দ্বারা চিহ্নিত করা হয়, কারণ এটি একটি জটিল সফ্টওয়্যার-নিয়ন্ত্রিত ডিভাইস এবং একটি ইলেকট্রনিক ডিভাইস (মাইক্রোসার্কিট) উভয়ই। অতএব, একটি মাইক্রোপ্রসেসরের জন্য, কেস টাইপ এবং প্রসেসরের জন্য নির্দেশনা উভয় সেট… একটি মাইক্রোপ্রসেসরের ক্ষমতা মাইক্রোপ্রসেসর আর্কিটেকচারের ধারণা দ্বারা সংজ্ঞায়িত করা হয়।
প্রসেসরের নামে উপসর্গ "মাইক্রো" এর অর্থ হল এটি মাইক্রোন প্রযুক্তি ব্যবহার করে প্রয়োগ করা হয়েছে।

চিত্র 2 — ইন্টেল পেন্টিয়াম 4 মাইক্রোপ্রসেসরের বাহ্যিক দৃশ্য
অপারেশন চলাকালীন, মাইক্রোপ্রসেসর মেমরি বা একটি ইনপুট পোর্ট থেকে প্রোগ্রাম কমান্ড পড়ে এবং সেগুলি কার্যকর করে। প্রতিটি কমান্ডের অর্থ কী তা প্রসেসরের নির্দেশ সেট দ্বারা নির্ধারিত হয়। নির্দেশ সেটটি মাইক্রোপ্রসেসরের আর্কিটেকচারে তৈরি করা হয়, এবং কমান্ড কোডের সঞ্চালন প্রসেসরের অভ্যন্তরীণ উপাদানগুলির দ্বারা নির্দিষ্ট মাইক্রো-অপারেশনের সম্পাদনে প্রকাশ করা হয়।
মাইক্রোপ্রসেসর আর্কিটেকচার - এটি তার যৌক্তিক সংগঠন; এটি একটি মাইক্রোপ্রসেসর সিস্টেম তৈরি করার জন্য প্রয়োজনীয় ফাংশনগুলির হার্ডওয়্যার এবং সফ্টওয়্যার বাস্তবায়নের ক্ষেত্রে মাইক্রোপ্রসেসরের ক্ষমতাকে সংজ্ঞায়িত করে।
মাইক্রোপ্রসেসরের প্রধান বৈশিষ্ট্য:
1) ঘড়ির ফ্রিকোয়েন্সি (মেগাহার্জ বা GHz পরিমাপের একক) — 1 সেকেন্ডে ঘড়ির স্পন্দনের সংখ্যা।ঘড়ির ডাল একটি ঘড়ি জেনারেটর দ্বারা উত্পন্ন হয়, যা সাধারণত প্রসেসরের ভিতরে থাকে। যেহেতু সমস্ত ক্রিয়াকলাপ (নির্দেশাবলী) ঘড়ি চক্রে সঞ্চালিত হয়, তারপরে কাজের কার্যকারিতা (প্রতি ইউনিট সময় সম্পাদিত অপারেশনের সংখ্যা) ঘড়ির ফ্রিকোয়েন্সির উপর নির্ভর করে। প্রসেসর ফ্রিকোয়েন্সি নির্দিষ্ট সীমার মধ্যে পরিবর্তিত হতে পারে।
2) বিট প্রসেসর (8, 16, 32, 64 বিট, ইত্যাদি) — একটি ঘড়ি চক্রে প্রক্রিয়াকৃত ডেটার বাইটের সংখ্যা নির্দিষ্ট করে। একটি প্রসেসরের বিট প্রস্থ তার অভ্যন্তরীণ রেজিস্টারের বিট প্রস্থ দ্বারা নির্ধারিত হয়। একটি প্রসেসর 8-বিট, 16-বিট, 32-বিট, 64-বিট ইত্যাদি হতে পারে। ডেটা 1, 2, 4, 8 বাইটের খণ্ডে প্রক্রিয়া করা হয়। এটা স্পষ্ট যে বিট গভীরতা যত বেশি হবে, কাজের উত্পাদনশীলতা তত বেশি হবে।
মাইক্রোপ্রসেসরের অভ্যন্তরীণ আর্কিটেকচার
একটি সাধারণ 8-বিট মাইক্রোপ্রসেসরের একটি সরলীকৃত অভ্যন্তরীণ আর্কিটেকচার চিত্র 3-এ দেখানো হয়েছে। মাইক্রোপ্রসেসরের গঠনকে তিনটি প্রধান অংশে ভাগ করা যায়:
1) কমান্ড, ডেটা এবং ঠিকানাগুলির অস্থায়ী স্টোরেজের জন্য নিবন্ধন;
2) পাটিগণিত লজিক ইউনিট (ALU) যা পাটিগণিত এবং যৌক্তিক ক্রিয়াকলাপ সম্পাদন করে;
3) কন্ট্রোল এবং টাইমিং সার্কিট — কমান্ড নির্বাচন প্রদান করে, ALU-এর অপারেশন সংগঠিত করে, সমস্ত মাইক্রোপ্রসেসর রেজিস্টারে অ্যাক্সেস প্রদান করে, বাহ্যিক নিয়ন্ত্রণ সংকেত উপলব্ধি করে এবং উৎপন্ন করে।
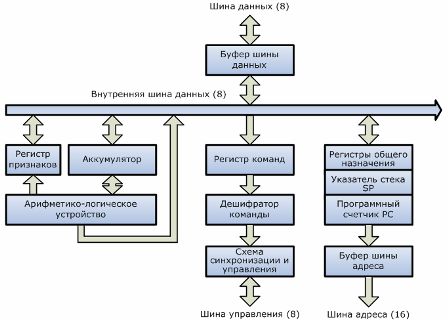
চিত্র 3 — একটি 8-বিট মাইক্রোপ্রসেসরের সরলীকৃত অভ্যন্তরীণ আর্কিটেকচার
আপনি ডায়াগ্রাম থেকে দেখতে পাচ্ছেন, প্রসেসরটি রেজিস্টারের উপর ভিত্তি করে, যা বিশেষ (একটি নির্দিষ্ট উদ্দেশ্য সহ) এবং সাধারণ উদ্দেশ্য রেজিস্টারে বিভক্ত।
প্রোগ্রাম কাউন্টার (কম্পিউটার) - পরবর্তী কমান্ড বাইটের ঠিকানা সম্বলিত একটি রেজিস্টার। প্রসেসরকে জানতে হবে পরবর্তী কোন কমান্ডটি কার্যকর করা হবে।
ব্যাটারি - যুক্তি এবং গাণিতিক প্রক্রিয়াকরণের জন্য বেশিরভাগ নির্দেশে ব্যবহৃত একটি রেজিস্টার; এটি ALU অপারেশনের জন্য প্রয়োজনীয় ডেটার বাইটগুলির একটির উৎস এবং যেখানে ALU অপারেশনের ফলাফল স্থাপন করা হয়েছে উভয়ই।
একটি ফাংশন রেজিস্টার (বা ফ্ল্যাগ রেজিস্টার) মাইক্রোপ্রসেসরের অভ্যন্তরীণ অবস্থা সম্পর্কে তথ্য ধারণ করে, বিশেষত শেষ ALU অপারেশনের ফলাফল। একটি পতাকা রেজিস্টার সাধারণ অর্থে একটি নিবন্ধন নয়, তবে কেবল ফ্লিপ ফ্লপগুলির একটি সেট (উপর বা নীচে পতাকা। সাধারণত শূন্য, ওভারফ্লো, নেতিবাচক এবং বহন পতাকা থাকে)।
স্ট্যাক পয়েন্টার (এসপি) - স্ট্যাকের অবস্থানের উপর নজর রাখে, অর্থাৎ এটি তার সর্বশেষ ব্যবহৃত ঘরের ঠিকানা ধারণ করে। স্ট্যাক - ডেটা স্টোরেজ সংগঠিত করার একটি উপায়।
একটি কমান্ড রেজিস্টারে বর্তমান কমান্ড বাইট রয়েছে যা কমান্ড ডিকোডার দ্বারা ডিকোড করা হচ্ছে।
বাহ্যিক বাস লাইনগুলি অভ্যন্তরীণ বাস লাইনগুলি থেকে বাফার দ্বারা বিচ্ছিন্ন হয় এবং প্রধান অভ্যন্তরীণ উপাদানগুলি একটি উচ্চ-গতির অভ্যন্তরীণ ডেটা বাস দ্বারা সংযুক্ত থাকে।
একটি মাল্টিপ্রসেসর সিস্টেমের কর্মক্ষমতা উন্নত করতে, কেন্দ্রীয় প্রসেসরের ফাংশনগুলি বিভিন্ন প্রসেসরের মধ্যে বিতরণ করা যেতে পারে। সেন্ট্রাল প্রসেসরকে সাহায্য করার জন্য, কম্পিউটার প্রায়ই কো-প্রসেসরের সাথে পরিচয় করিয়ে দেয়, যে কোন নির্দিষ্ট ফাংশনের দক্ষতার উপর দৃষ্টি নিবদ্ধ করে। বিস্তৃত গাণিতিক এবং গ্রাফিক সহ-প্রসেসর, ইনপুট এবং আউটপুট বাহ্যিক ডিভাইসগুলির সাথে মিথস্ক্রিয়া করার সহজ কিন্তু অসংখ্য অপারেশন থেকে কেন্দ্রীয় প্রসেসরকে অফলোড করে।
বর্তমান পর্যায়ে, উত্পাদনশীলতা বৃদ্ধির প্রধান দিক হল মাল্টি-কোর প্রসেসরের বিকাশ, যেমন একটি ক্ষেত্রে দুই বা ততোধিক প্রসেসরকে একত্রিত করে সমান্তরালভাবে (একযোগে) বেশ কয়েকটি ক্রিয়াকলাপ সম্পাদন করা।
ইন্টেল এবং এএমডি প্রসেসর ডিজাইন এবং উত্পাদনের জন্য নেতৃস্থানীয় কোম্পানি।
মাইক্রোপ্রসেসর সিস্টেম অ্যালগরিদম
অ্যালগরিদম - একটি সুনির্দিষ্ট প্রেসক্রিপশন যা প্রাথমিক তথ্যকে ক্রিয়াকলাপের ক্রমানুসারে রূপান্তর করার প্রক্রিয়াটিকে অনন্যভাবে সেট করে যা একটি নির্দিষ্ট শ্রেণীর কাজের একটি সেট সমাধান করতে এবং পছন্দসই ফলাফল পেতে দেয়।
সমগ্র মাইক্রোপ্রসেসর সিস্টেমের প্রধান নিয়ন্ত্রণ উপাদান হল একটি প্রসেসর... এটি, কয়েকটি বিশেষ ক্ষেত্রে বাদে, অন্যান্য সমস্ত ডিভাইস নিয়ন্ত্রণ করে। অবশিষ্ট ডিভাইস, যেমন RAM, ROM এবং I/O পোর্টগুলি অধীনস্থ।
এটি চালু হওয়ার সাথে সাথে, প্রসেসরটি প্রোগ্রামগুলি সংরক্ষণের জন্য সংরক্ষিত মেমরি এলাকা থেকে ডিজিটাল কোড পড়তে শুরু করে। পঠন প্রথম থেকে শুরু করে ক্রমানুসারে কোষ দ্বারা সেল করা হয়। একটি কক্ষে ডেটা, ঠিকানা এবং কমান্ড থাকে। একটি নির্দেশ হল প্রাথমিক ক্রিয়াগুলির মধ্যে একটি যা একটি মাইক্রোপ্রসেসর সম্পাদন করতে পারে। মাইক্রোপ্রসেসরের সমস্ত কাজ ক্রমান্বয়ে পড়া এবং কমান্ড কার্যকর করা হয়।
প্রোগ্রাম কমান্ড কার্যকর করার সময় মাইক্রোপ্রসেসরের কর্মের ক্রম বিবেচনা করুন:
1) পরবর্তী নির্দেশ কার্যকর করার আগে, মাইক্রোপ্রসেসর কম্পিউটার প্রোগ্রাম কাউন্টারে তার ঠিকানা সংরক্ষণ করে।
2) এমপি কম্পিউটারে থাকা ঠিকানায় মেমরি অ্যাক্সেস করে এবং কমান্ড রেজিস্টারে পরবর্তী কমান্ডের প্রথম বাইট মেমরি থেকে পড়ে।
3) কমান্ড ডিকোডার কমান্ড কোড ডিকোড (ডিসিফার) করে।
4) ডিকোডার থেকে প্রাপ্ত তথ্য অনুসারে, কন্ট্রোল ইউনিট মাইক্রো-অপারেশনের একটি সময়-অনুযায়ী ক্রম তৈরি করে যা কমান্ড নির্দেশাবলী চালায়, যার মধ্যে রয়েছে:
— রেজিস্টার এবং মেমরি থেকে অপারেন্ড পুনরুদ্ধার করে;
- কমান্ড কোড দ্বারা নির্ধারিত তাদের উপর গাণিতিক, যৌক্তিক বা অন্যান্য ক্রিয়াকলাপ সম্পাদন করে;
— কমান্ডের দৈর্ঘ্যের উপর নির্ভর করে, কম্পিউটারের বিষয়বস্তু পরিবর্তন করে;
— পরবর্তী কমান্ডে নিয়ন্ত্রণ স্থানান্তর করে যার ঠিকানা আবার কম্পিউটার প্রোগ্রাম কাউন্টারে রয়েছে।
একটি মাইক্রোপ্রসেসরের জন্য নির্দেশিকা সেট তিনটি গ্রুপে বিভক্ত করা যেতে পারে:
1) ডেটা সরানোর জন্য কমান্ড
স্থানান্তর মেমরি, প্রসেসর, I/O পোর্টের (প্রতিটি পোর্টের নিজস্ব ঠিকানা আছে), প্রসেসর রেজিস্টারের মধ্যে হয়।
2) ডেটা ট্রান্সফরমেশন কমান্ড
সমস্ত ডেটা (টেক্সট, ছবি, ভিডিও, ইত্যাদি) সংখ্যা, এবং শুধুমাত্র গাণিতিক এবং যৌক্তিক ক্রিয়াকলাপগুলি সংখ্যা দিয়ে সঞ্চালিত হতে পারে। অতএব, এই গ্রুপের কমান্ডের মধ্যে যোগ, বিয়োগ, তুলনা, যৌক্তিক ক্রিয়াকলাপ ইত্যাদি অন্তর্ভুক্ত রয়েছে।
3) নিয়ন্ত্রণ কমান্ড স্থানান্তর
এটি একটি প্রোগ্রামের জন্য একটি একক অনুক্রমিক নির্দেশ নিয়ে গঠিত খুব বিরল। বেশিরভাগ অ্যালগরিদমের প্রোগ্রাম ব্রাঞ্চিং প্রয়োজন। প্রোগ্রামটির কাজের অ্যালগরিদম পরিবর্তন করার জন্য, যে কোনও অবস্থার উপর নির্ভর করে, নিয়ন্ত্রণ স্থানান্তর কমান্ড ব্যবহার করা হয়। এই কমান্ডগুলি বিভিন্ন পাথ বরাবর প্রোগ্রাম নির্বাহের প্রবাহ নিশ্চিত করে এবং লুপগুলিকে সংগঠিত করে।
বাহ্যিক ডিভাইস
বাহ্যিক ডিভাইসগুলির মধ্যে সমস্ত ডিভাইস অন্তর্ভুক্ত রয়েছে যা প্রসেসরের বাহ্যিক (RAM ব্যতীত) এবং I/O পোর্টের মাধ্যমে সংযুক্ত। বাহ্যিক ডিভাইস তিনটি গ্রুপে শ্রেণীবদ্ধ করা যেতে পারে:
1) মানব-কম্পিউটার যোগাযোগ ডিভাইস (কীবোর্ড, মনিটর, প্রিন্টার, ইত্যাদি);
2) নিয়ন্ত্রণ বস্তুর সাথে যোগাযোগের জন্য ডিভাইস (সেন্সর, অ্যাকুয়েটর, ADC এবং DAC);
3) বড় ক্ষমতা সহ বাহ্যিক স্টোরেজ ডিভাইস (হার্ড ডিস্ক, ফ্লপি ডিস্ক)।
বহিরাগত ডিভাইসগুলি মাইক্রোপ্রসেসর সিস্টেমের সাথে শারীরিকভাবে সংযুক্ত থাকে — সংযোগকারীর মাধ্যমে এবং যৌক্তিকভাবে — পোর্টের (কন্ট্রোলার) মাধ্যমে।
প্রসেসর এবং বাহ্যিক ডিভাইসগুলির মধ্যে ইন্টারফেস করতে একটি ইন্টারাপ্ট সিস্টেম (মেকানিজম) ব্যবহার করা হয়।
ব্যাহত সিস্টেম
এটি একটি বিশেষ প্রক্রিয়া যা যে কোনও সময়, একটি বাহ্যিক সংকেতের মাধ্যমে, প্রসেসরকে প্রধান প্রোগ্রামের কার্য সম্পাদন বন্ধ করতে বাধ্য করতে, বাধা সৃষ্টিকারী ইভেন্টের সাথে সম্পর্কিত ক্রিয়াকলাপগুলি সম্পাদন করতে এবং তারপরে মূল প্রোগ্রামের সম্পাদনে ফিরে যেতে দেয়। .
প্রতিটি মাইক্রোপ্রসেসরে অন্তত একটি ইন্টারাপ্ট রিকোয়েস্ট ইনপুট INT (Interrupt শব্দ থেকে) থাকে।
আসুন একটি কীবোর্ডের সাথে একটি ব্যক্তিগত কম্পিউটার প্রসেসরের মিথস্ক্রিয়াটির একটি উদাহরণ বিবেচনা করি (চিত্র 4)।
কীবোর্ড - প্রতীকী তথ্য এবং নিয়ন্ত্রণ কমান্ড প্রবেশ করার জন্য একটি ডিভাইস। কীবোর্ড সংযোগ করতে, কম্পিউটারে একটি বিশেষ কীবোর্ড পোর্ট (চিপ) রয়েছে।
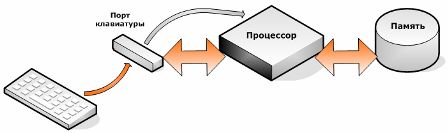
চিত্র 4 — কীবোর্ডের সাথে CPU অপারেশন
কাজের অ্যালগরিদম:
1) একটি কী চাপলে কীবোর্ড নিয়ামক একটি সংখ্যাসূচক কোড তৈরি করে। এই সংকেত কিবোর্ড পোর্ট চিপে যায়।
2) কীবোর্ড পোর্ট সিপিইউতে একটি বাধা সংকেত পাঠায়। প্রতিটি বাহ্যিক ডিভাইসের নিজস্ব বাধা নম্বর থাকে যার মাধ্যমে প্রসেসর এটিকে চিনতে পারে।
3) কীবোর্ড থেকে একটি বিঘ্ন পাওয়ার পরে, প্রসেসরটি প্রোগ্রামটি সম্পাদনে বাধা দেয় (উদাহরণস্বরূপ, মাইক্রোসফ্ট অফিস ওয়ার্ড এডিটর) এবং মেমরি থেকে কীবোর্ড কোডগুলি প্রক্রিয়া করার জন্য প্রোগ্রামটি লোড করে। এই জাতীয় প্রোগ্রামটিকে ড্রাইভার বলা হয়।
4) এই প্রোগ্রামটি প্রসেসরকে কীবোর্ড পোর্টে নিয়ে যায় এবং প্রসেসর রেজিস্টারে সাংখ্যিক কোড লোড করা হয়।
5) ডিজিটাল কোড মেমরিতে সংরক্ষণ করা হয় এবং প্রসেসর অন্য কাজ সম্পাদন করতে থাকে।
অপারেশনের উচ্চ গতির কারণে, প্রসেসর একই সাথে প্রচুর পরিমাণে প্রসেস চালায়।