পাইপ ফিটিং বৈদ্যুতিক ড্রাইভ
খুব প্রায়ই, পাইপলাইন ভালভ নিয়ন্ত্রণ করতে একটি বৈদ্যুতিক ড্রাইভ ব্যবহার করা হয়। বৈদ্যুতিক ড্রাইভটি বিদ্যুত দ্বারা চালিত হয়, যা বর্তমানে শক্তির সবচেয়ে উপলব্ধ রূপ। যাইহোক, এটি শুধুমাত্র বিদ্যুৎ সরবরাহের কারণেই নয় যে বৈদ্যুতিক ড্রাইভটি এমন জনপ্রিয়তা অর্জন করেছে।
প্রথমত, এখানে বিদ্যুত শুধুমাত্র অপারেশন চলাকালীন খরচ করা হয় (যখন খোলা বা বন্ধ করার প্রয়োজন হয়), যখন সরাসরি নিয়ন্ত্রণ সরাসরি সাইটে বা দূরবর্তীভাবে করা যেতে পারে।
দ্বিতীয়ত, স্বয়ংক্রিয় নিয়ন্ত্রণ কমান্ড এবং সঞ্চালনের মধ্যে বিরতি হ্রাস করার অনুমতি দেয় (ডিভাইসটি একটি নির্বাহী ডিভাইস)।
এবং তৃতীয়ত, বৃহত্তর এলাকা এবং পরিবেশিত ভালভের সংখ্যা, যত বেশি দূরত্ব থেকে নিয়ন্ত্রণ করা হয়, বৈদ্যুতিক ড্রাইভ ব্যবহার করার সময় সামগ্রিক দক্ষতা তত বেশি।

আজ, বৈদ্যুতিক ড্রাইভগুলি সফলভাবে এবং দক্ষতার সাথে পাইপলাইন ভালভের অটোমেশন এবং সহজ যান্ত্রিকীকরণ পরিবেশন করে। এগুলি অনেক পাইপলাইনে ব্যাপকভাবে ব্যবহৃত হয় এবং বিভিন্ন শিল্প প্রক্রিয়ায় গুরুত্বপূর্ণ ভূমিকা পালন করে।
বৈদ্যুতিক অ্যাকুয়েটরগুলি প্রায়শই ভালভের স্বয়ংক্রিয় রিমোট কন্ট্রোলের উদ্দেশ্যে, আনলক এবং লক করার জন্য, ভালভের বর্তমান অবস্থানের ক্রমাগত সমন্বয়, নির্ণয় এবং পর্যবেক্ষণের জন্য ইনস্টল করা হয়।
ভালভের ঘূর্ণায়মান অংশের গতিশক্তি নির্দেশিত হতে পারে, উদাহরণস্বরূপ, পাইপের ভিতরে একটি প্রজাপতি ভালভ বা বল ভালভ খুলতে। যাইহোক, বৈদ্যুতিক ড্রাইভের ইনস্টলেশন এবং রক্ষণাবেক্ষণের জন্য বিশেষ কর্মীদের প্রশিক্ষণের প্রয়োজন হয় না।
বিভিন্ন বৈদ্যুতিক ড্রাইভের টর্কের মধ্যে পার্থক্য রয়েছে — 5 থেকে 10,000 Nm পর্যন্ত, তাদের নকশা প্রচলিত বা বিস্ফোরণ-প্রমাণ হতে পারে।
বৈদ্যুতিক ড্রাইভের বৈশিষ্ট্যগুলি তাদের চিহ্নিতকরণে প্রতিফলিত হয়, যার মধ্যে অক্ষর এবং সংখ্যা রয়েছে যা প্রতিফলিত করে: ভালভের সাথে সংযোগের ধরণ (অক্ষরে), টর্কের মাত্রা (এনএম সংখ্যায়) এবং ড্রাইভ শ্যাফ্টের গতি বৈদ্যুতিক ড্রাইভের (আরপিএম-এ), নাট ফিটিং বা টাকুতে ঘূর্ণন প্রেরণ করা এবং অন্যান্য গুরুত্বপূর্ণ পরামিতি।

প্রায়শই, ড্রাইভগুলি এসি মোটরগুলির ভিত্তিতে তৈরি করা হয়। এছাড়াও, নকশায় একটি পাওয়ার লিমিটার থাকতে পারে, অপারেশনের নীতি অনুসারে, কোন ভালভ ড্রাইভগুলিকে ভাগ করা হয়েছে:
-
ঘর্ষণ ক্যাম,
-
ঘর্ষণমূলক,
-
বৈদ্যুতিক,
-
ইলেক্ট্রোমেকানিক্যাল,
-
ইলেক্ট্রোম্যাগনেটিক
গিয়ারবক্সের নকশার উপর নির্ভর করে, ড্রাইভটি নিম্নলিখিত ধরণের একটি গিয়ারবক্স দিয়ে সজ্জিত:
-
কৃমি
-
গ্রহ,
-
নলাকার,
-
সুইং স্ক্রু,
-
জটিল (যখন একটি ডিভাইসের মধ্যে বিভিন্ন ধরণের গিয়ারবক্স ব্যবহার করা হয়)।
ড্রাইভের কার্যকারী উপাদান কীভাবে এবং কতটা চলে তার উপর ভিত্তি করে, ড্রাইভগুলিকে আলাদা করা হয়:
-
সোজা সামনে
-
অনেক বাঁক
-
আংশিক ঘূর্ণন,
-
লিভার
ডিভাইসের উপাদান অংশ
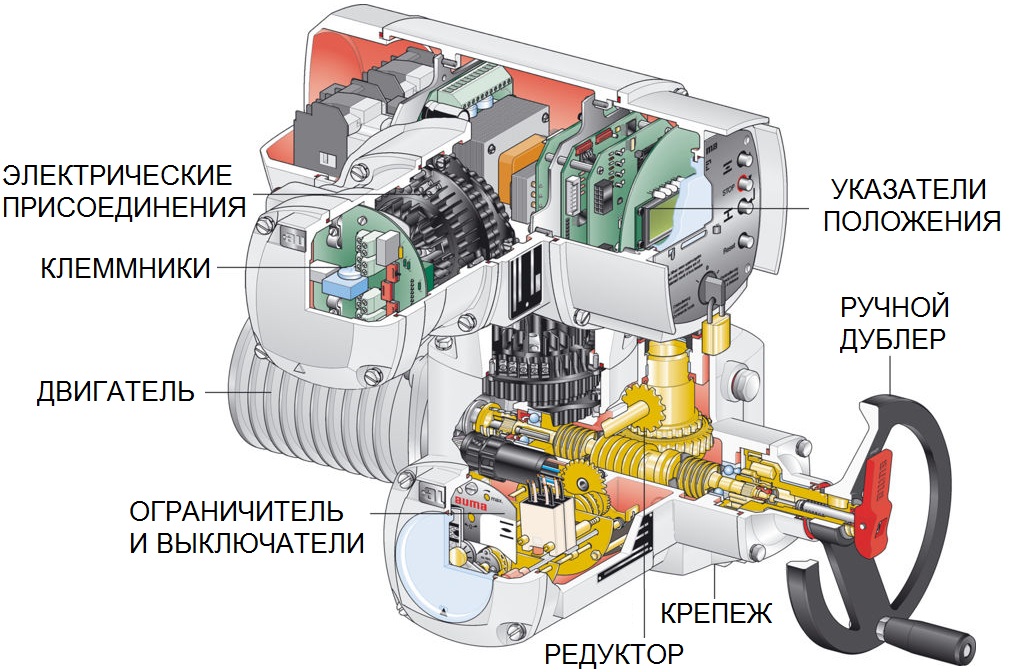
প্রথমত, ড্রাইভে একটি মোটর ইনস্টল করা হয়, একটি নিয়ম হিসাবে, এটি একটি এসি অ্যাসিঙ্ক্রোনাস মোটর যা ডিভাইসে গতিশক্তি সরবরাহ করার জন্য ডিজাইন করা হয়েছে। ওভারলোড থেকে ডিভাইসটিকে রক্ষা করার জন্য একটি পাওয়ার লিমিটিং ডিভাইস ইনস্টল করা হয়। সীমাবদ্ধ ডিভাইসটিকে একটি শক শোষকের সাথে সম্পূরক করা যেতে পারে, যা চলমান অংশগুলির জড়তামূলক ক্রিয়া থেকে ভালভকে মুক্তি দেয়।
নকশা এছাড়াও অন্তর্ভুক্ত ভ্রমণ সুইচ, যার কাজগুলি কার্যকারী সংস্থার বর্তমান অবস্থানকে সংকেত দেওয়া, প্রক্রিয়াগুলিকে ব্লক করা এবং ইঞ্জিন পাওয়ার সাপ্লাই বন্ধ করা।
মোটর শ্যাফ্ট থেকে ঘূর্ণন গিয়ারবক্সে প্রেরণ করা হয়, যা টর্ককে রূপান্তর করে, গতি হ্রাস করে এবং নিয়ন্ত্রণ বস্তুর প্রয়োজনীয় স্তরে শক্তি বাড়ায়। অ্যাকচুয়েটর একটি কঠোর ফ্ল্যাঞ্জ সংযোগ এবং একটি সংযোগকারী শ্যাফ্ট কাপলিং এর মাধ্যমে ভালভের সাথে সংযুক্ত থাকে।
বিদ্যুতের ব্যর্থতার ক্ষেত্রে এবং ইনস্টলেশন এবং চালু করার সময় একটি হ্যান্ডহুইল প্রয়োজন - মানুষের আঘাত এড়াতে হঠাৎ বিদ্যুৎ চালু করা হলে ইঞ্জিনটি চালু করা থেকে নিষ্ক্রিয় করার জন্য কর্মীদের দ্বারা ব্যবহারের সময় একটি সুইচ চালু করা হয়।
পজিশন ইন্ডিকেটরটি ভালভের বর্তমান অবস্থান, যেকোনো সময়ে খোলার ডিগ্রী ট্র্যাক করতে ব্যবহৃত হয়। অবস্থান সেন্সর দূরবর্তীভাবে শাট-অফ ভালভ খোলার ডিগ্রি বা নিয়ন্ত্রিত ভালভের অবস্থান (একটি প্রতিক্রিয়া সেন্সর হিসাবে) সংকেত দেয়।
পাওয়ার তার এবং সিগন্যাল তার সেন্সর এবং মোটরের সাথে সংযুক্ত। কিছু ডিভাইস টার্মিনাল ব্লক দিয়ে সজ্জিত, যা উন্নত প্রক্রিয়া অটোমেশন সিস্টেমের সাথে পরিকাঠামোর জন্য সুবিধাজনক।
বিভিন্ন বৈদ্যুতিক ড্রাইভের অ্যাপ্লিকেশন
একটি আংশিক বাঁক (চতুর্থাংশ বাঁক বা এক পালা) সহ বৈদ্যুতিক অ্যাকুয়েটরগুলি ভালভগুলিতে ইনস্টল করা হয়, যেখানে সঠিক নিয়ন্ত্রণের জন্য স্টেমটি 90 ডিগ্রি ঘুরানো যথেষ্ট। এগুলি হল বল ভালভ, থ্রোটল ভালভ ইত্যাদি। এখানে, একটি বড় টর্ক অবিলম্বে প্রয়োজন, যেহেতু কার্যকারী দেহটি খুব শক্তভাবে চাপা হয়, উপরন্তু, সিলিং উপকরণ ব্যবহার করা হয়।
মাল্টি-টার্ন অ্যাকচুয়েটরগুলি ভালভ, রাবার ওয়েজ ভালভ, ভালভ এবং শাট-অফ ভালভের জন্য উপযুক্ত। আংশিক-ঘূর্ণন ভালভের মতো প্রারম্ভিক টর্কের প্রয়োজন নেই কারণ অ্যাকচুয়েশনের সময় ঘূর্ণনের উপর ঘর্ষণ প্রায় কোনও প্রভাব ফেলে না।
বিকল্পভাবে, মাল্টি-টার্ন অ্যাকচুয়েটরকে একটি আংশিক-টার্ন ভালভের উপর একটি অক্জিলিয়ারী গিয়ারবক্সের সাথে একত্রে লাগানো হয় যাতে কম শক্তি এবং কম খরচে বৈদ্যুতিক অ্যাকুয়েটর আছে এমন বড় ভালভগুলিকে নিয়ন্ত্রণ করার ক্ষমতা বাড়াতে।
রৈখিক অ্যাকুয়েটরগুলিতে, মোটরের ঘূর্ণন অ্যাকচুয়েটরের রৈখিক গতিতে রূপান্তরিত হয়, অতএব, যদি একটি মসৃণ স্টেম বা একটি নিয়ন্ত্রণ ভালভ সহ একটি ভালভ স্বয়ংক্রিয় করার প্রয়োজন হয় তবে একটি লিনিয়ার অ্যাকুয়েটর এখানে উপযুক্ত। একটি লিভার প্রক্রিয়া দ্বারা পরিচালিত ড্যাম্পার, ভালভ এবং ল্যুভার্সের জন্য - একটি বৈদ্যুতিক লিভার অ্যাকুয়েটর উপযুক্ত।