সেন্সর সংযোগ চিত্র
সেন্সরের সংযোগ চিত্র, যাকে সাধারণত বলা হয় পরিমাপ সার্কিট, সেন্সরের আউটপুট মান রূপান্তর করার জন্য ডিজাইন করা হয়েছে, এবং বেশিরভাগ ক্ষেত্রে এটি তাদের অভ্যন্তরীণ প্রতিরোধের একটি পরিবর্তন, এটি পরবর্তী ব্যবহারের জন্য আরও সুবিধাজনক মানতে। একটি নিয়ম হিসাবে, এটি একটি বৈদ্যুতিক প্রবাহ বা ভোল্টেজের পরিবর্তন যা হয় সরাসরি একটি বৈদ্যুতিক পরিমাপ যন্ত্র ব্যবহার করে নির্ধারণ করা যেতে পারে বা, প্রসারিত হওয়ার পরে, একটি উপযুক্ত অ্যাকচুয়েটর বা রেকর্ডিং ডিভাইসে খাওয়ানো হয়।

এই উদ্দেশ্যে, নিম্নলিখিত সুইচিং স্কিমগুলি ব্যাপকভাবে ব্যবহৃত হয়:
-
সামঞ্জস্যপূর্ণ,
-
ফুটপাথ,
-
ডিফারেনশিয়াল,
-
ক্ষতিপূরণমূলক
অনুক্রমিক সার্কিট ডায়াগ্রাম একটি DC বা AC উত্স, Rx সেন্সর নিজেই, একটি পরিমাপকারী যন্ত্র বা সরাসরি ড্রাইভ প্রক্রিয়া এবং সাধারণত একটি অতিরিক্ত প্রতিরোধের Rd যা এই সার্কিটে কারেন্টকে সীমিত করে (চিত্র 1) নিয়ে গঠিত। এই ধরনের একটি সুইচিং সার্কিট প্রায়শই শুধুমাত্র যোগাযোগ সেন্সরগুলির সাথে ব্যাপকভাবে ব্যবহৃত হয় যার জন্য Rx = 0 বা Rx =?
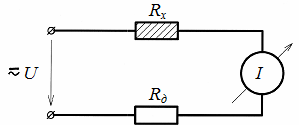
ভাত। 1. সংযোগ সেন্সর জন্য সিরিয়াল সার্কিট
কারণ পরিমাপ যন্ত্রের সার্কিটে অন্যান্য সেন্সরগুলির সাথে কাজ করার সময়, I = U /(Rx + Rd) অভিব্যক্তি দ্বারা নির্ধারিত একটি বৈদ্যুতিক প্রবাহ সর্বদা প্রবাহিত হয় এবং সেন্সরের অভ্যন্তরীণ প্রতিরোধের সামান্য পরিবর্তন খুব ছোট পরিবর্তনের দিকে নিয়ে যায়। এই স্রোতে। ফলস্বরূপ, পরিমাপের যন্ত্রের স্কেলের ন্যূনতম বিভাগটি ব্যবহার করা হয় এবং পরিমাপের নির্ভুলতা কার্যত শূন্যে নেমে আসে। অতএব, বেশিরভাগ অন্যান্য সেন্সরের জন্য, বিশেষ পরিমাপ সার্কিট ব্যবহার করা হয়, যা পরিমাপের সংবেদনশীলতা এবং নির্ভুলতা উল্লেখযোগ্যভাবে বৃদ্ধি করে।
সবচেয়ে বেশি ব্যবহৃত হয় সেতু সার্কিট সুইচিং, যেখানে একটি এবং কখনও কখনও একাধিক সেন্সর একটি নির্দিষ্ট উপায়ে একটি চতুর্ভুজ অতিরিক্ত প্রতিরোধকের সাথে সংযুক্ত থাকে (তথাকথিত উইনস্টন ব্রিজ), যার দুটি কর্ণ রয়েছে (চিত্র 2)। তাদের মধ্যে একটি, যাকে বলা হয় a-b পাওয়ার তির্যক, একটি DC বা AC উত্সকে সংযুক্ত করার জন্য ডিজাইন করা হয়েছে, এবং অন্যটি, c-d পরিমাপ তির্যক, একটি পরিমাপ যন্ত্র অন্তর্ভুক্ত করে।
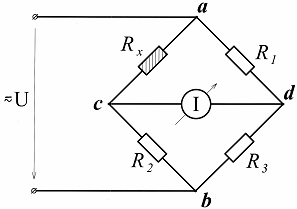
ভাত। 2. সংযোগ সেন্সর জন্য সেতু সার্কিট
চতুর্ভুজের (সেতু বাহু) বিপরীত বাহুর প্রতিরোধ মানের গুনফল সমান হলে Rx x R3 = R1NS R2 বিন্দু c এবং d এর সম্ভাব্যতা সমান হবে এবং পরিমাপের কর্ণে কোনো কারেন্ট থাকবে না। ব্রিজ সার্কিটের এই অবস্থাকে সাধারণত বলা হয় সেতু ভারসাম্য, অর্থাৎ ব্রিজ সার্কিট ভারসাম্যপূর্ণ।
যদি বাহ্যিক প্রভাবের কারণে Rx সেন্সরের প্রতিরোধের পরিবর্তন হয়, তাহলে ভারসাম্য বিঘ্নিত হবে এবং এই প্রতিরোধের পরিবর্তনের সমানুপাতিক একটি বর্তমান পরিমাপ যন্ত্রের মধ্য দিয়ে প্রবাহিত হবে। এই ক্ষেত্রে, এই স্রোতের দিক নির্দেশ করে কিভাবে সেন্সরের প্রতিরোধ ক্ষমতা পরিবর্তিত হয়েছে (বৃদ্ধি বা হ্রাস)।এখানে, পরিমাপ যন্ত্রের সংবেদনশীলতার একটি উপযুক্ত পছন্দের সাথে, এটি সব কাজের স্কেল.
বিবেচনাধীন সেতু সার্কিট বলা হয় ভারসাম্যহীন, পরিমাপ প্রক্রিয়া সঞ্চালিত হয় হিসাবে ভারসাম্যহীনতা সেতু, যেমন ভারসাম্যহীনতা একটি ভারসাম্যহীন ব্রিজ সার্কিট প্রায়শই এমন ক্ষেত্রে ব্যবহৃত হয় যেখানে বাহ্যিক শক্তির প্রভাবের অধীনে সেন্সরের প্রতিরোধ প্রতি ইউনিট সময় খুব দ্রুত পরিবর্তিত হতে পারে, তবে তারপরে একটি পরিমাপক যন্ত্রের পরিবর্তে একটি রেকর্ডিং ডিভাইস ব্যবহার করা আরও সমীচীন যা এইগুলি রেকর্ড করবে। পরিবর্তন
এটি আরও সংবেদনশীল বলে মনে করা হয় সুষম সেতু সার্কিট, যেখানে একটি বিশেষ পরিমাপকারী রিওস্ট্যাট R (চিত্র 3), একটি স্কেল দিয়ে সজ্জিত এবং পরিমাপ কৌশলে একটি রিওকর্ড নামে পরিচিত, অতিরিক্তভাবে দুটি সন্নিহিত বাহুতে সংযুক্ত।
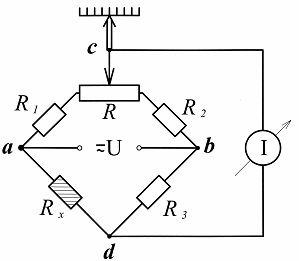
ভাত। 3. সুষম সেতু সার্কিট
এই জাতীয় সার্কিটের সাথে কাজ করার সময়, সেন্সরের প্রতিরোধের প্রতিটি পরিবর্তনের সাথে, ব্রিজ সার্কিটটিকে অবশ্যই অন্তর্ভুক্ত স্লাইডারের সাথে ভারসাম্যপূর্ণ করতে হবে, যেমন যখন পরিমাপ তির্যক কোন বর্তমান নেই. এই ক্ষেত্রে, পরিমাপ করা প্যারামিটারের মান (সেন্সরের প্রতিরোধের মান পরিবর্তন) একটি বিশেষ স্কেল দ্বারা নির্ধারিত হয় যা এই রেকর্ডের সাথে সজ্জিত এবং সেন্সর দ্বারা পরিমাপ করা মানের এককগুলিতে ক্যালিব্রেট করা হয়।
ভারসাম্যপূর্ণ সেতুর উচ্চ নির্ভুলতা এই সত্য দ্বারা ব্যাখ্যা করা হয় যে পরিমাপক যন্ত্রে কারেন্টের অভাব সরাসরি এর মান পরিমাপের চেয়ে নির্ণয় করা সহজ এবং এই জাতীয় ক্ষেত্রে সেতুর ভারসাম্য বজায় রাখা, একটি নিয়ম হিসাবে, একটি ব্যবহার করে করা হয়। ব্রিজ সার্কিট ভারসাম্যহীন সংকেত দ্বারা নিয়ন্ত্রিত বিশেষ বৈদ্যুতিক মোটর।
সেন্সর স্যুইচ করার জন্য ব্রিজ সার্কিটগুলিকে সার্বজনীন বলে মনে করা হয়, যেহেতু এগুলি সরাসরি এবং বিকল্প কারেন্ট উভয় দ্বারা চালিত হতে পারে এবং সবচেয়ে গুরুত্বপূর্ণভাবে, এই সার্কিটগুলির সাথে একই সময়ে বেশ কয়েকটি সেন্সর সংযুক্ত করা যেতে পারে, যা শুধুমাত্র সংবেদনশীলতা বৃদ্ধিতে অবদান রাখে না, বরং পরিমাপের যথার্থতা.
ডিফারেনশিয়াল সার্কিট সেন্সর অন্তর্ভুক্তি একটি বিকল্প বর্তমান নেটওয়ার্ক দ্বারা চালিত একটি বিশেষ ট্রান্সফরমার ব্যবহার করে নির্মিত হয়, যার সেকেন্ডারি উইন্ডিং দুটি অভিন্ন অংশে বিভক্ত। এইভাবে, এই সার্কিটে (চিত্র 4) দুটি সংলগ্ন সার্কিট গঠিত হয়, যার প্রত্যেকটির নিজস্ব বর্তমান লুপ I1 এবং I2 রয়েছে। এবং পরিমাপ যন্ত্রে কারেন্টের মান এই স্রোতের পার্থক্য দ্বারা নির্ধারিত হয়, এবং যদি সেন্সর Rx এবং অতিরিক্ত রোধ Rd এর রোধ সমান হয়, তাহলে পরিমাপ যন্ত্রে কোন কারেন্ট থাকবে না।
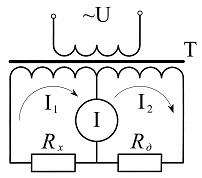
ভাত। 4. ডিফারেনশিয়াল সেন্সর সুইচিং সার্কিট
যখন সেন্সরের প্রতিরোধের পরিবর্তন হয়, তখন এই পরিবর্তনের সমানুপাতিক একটি কারেন্ট পরিমাপক যন্ত্রের মধ্য দিয়ে প্রবাহিত হবে এবং এই কারেন্টের পর্যায় নির্ভর করবে এই প্রতিরোধের পরিবর্তনের প্রকৃতির উপর (বৃদ্ধি বা হ্রাস)। ডিফারেনশিয়াল সার্কিটকে পাওয়ার জন্য শুধুমাত্র অল্টারনেটিং কারেন্ট ব্যবহার করা হয় এবং সেজন্য সেন্সর হিসেবে রিঅ্যাকটিভ সেন্সর (ইনডাকটিভ বা ক্যাপাসিটিভ) ব্যবহার করা বেশি উপযুক্ত।
ডিফারেনশিয়াল ইনডাকটিভ বা ক্যাপাসিটিভ সেন্সরগুলির সাথে কাজ করার সময় এই জাতীয় সুইচিং সার্কিট ব্যবহার করা বিশেষত সুবিধাজনক। এই ধরনের সেন্সর ব্যবহার করার সময়, শুধুমাত্র আন্দোলনের মাত্রাই নয়, উদাহরণস্বরূপ, ফেরোম্যাগনেটিক কোর (চিত্র 5), কিন্তু এই আন্দোলনের দিক (এর চিহ্ন)ও রেকর্ড করা হয়, যার ফলস্বরূপ পর্যায়ক্রমে পর্যায়ক্রমে পরিমাপকারী যন্ত্রের মধ্য দিয়ে বর্তমান ক্ষণস্থায়ী, পরিবর্তন।এটি পরিমাপের সংবেদনশীলতাকে আরও বাড়িয়ে তোলে।
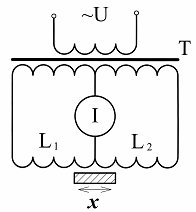
ভাত। 5. একটি ইন্ডাকটিভ ডিফারেনশিয়াল সেন্সরের সংযোগ চিত্র
এটি লক্ষ করা উচিত যে পরিমাপের নির্ভুলতা বাড়ানোর জন্য, কিছু ক্ষেত্রে অন্যান্য ধরণের অনুরূপ পরিমাপ সার্কিট ব্যবহার করা হয়, উদাহরণস্বরূপ, সুষম ডিফারেনশিয়াল সার্কিট… এই ধরনের সার্কিটগুলির মধ্যে একটি পুনরাবৃত্ত জ্যা বা একটি বিশেষ স্কেল সহ একটি বিশেষ পরিমাপ অটোট্রান্সফরমার অন্তর্ভুক্ত থাকে এবং এই ধরনের সার্কিটগুলির সাথে পরিমাপ প্রক্রিয়াটি একটি সুষম ব্রিজ সার্কিটের পরিমাপের অনুরূপ।
ক্ষতিপূরণ প্রকল্প সেন্সর অন্তর্ভুক্তি উপরে আলোচিত সবগুলির মধ্যে সবচেয়ে সঠিক বলে মনে করা হয়। এর অপারেশন আউটপুট ভোল্টেজ ক্ষতিপূরণ বা EMF উপর ভিত্তি করে। পরিমাপকারী রিওস্ট্যাটে (রিওকর্ড) ভোল্টেজ ড্রপের ক্ষেত্রে এটির সমান একটি সেন্সর। ক্ষতিপূরণ সার্কিট পাওয়ার জন্য শুধুমাত্র একটি ডিসি উৎস ব্যবহার করা হয় এবং এটি প্রধানত ডিসি জেনারেটর সেন্সরগুলির সাথে ব্যবহৃত হয়।
আসুন একটি সেন্সর হিসাবে একটি থার্মোকল ব্যবহার করার উদাহরণ ব্যবহার করে এই সার্কিটের অপারেশনটি দেখি (চিত্র 6)।
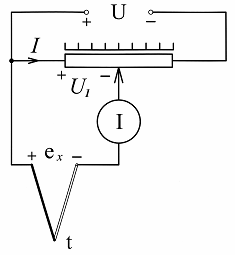
ভাত। 6. থার্মোইলেকট্রিক সেন্সর চালু করার জন্য ক্ষতিপূরণ সার্কিট
প্রয়োগকৃত ভোল্টেজ U এর ক্রিয়াকলাপের অধীনে, একটি কারেন্ট পরিমাপকারী রিওস্ট্যাটের মধ্য দিয়ে প্রবাহিত হয়, যা রিওস্ট্যাটের অংশে ভোল্টেজ U1 এর বাম আউটপুট থেকে মোটর পর্যন্ত ড্রপ করে। এই ভোল্টেজ এবং EMF থার্মোকলের সমতার ক্ষেত্রে - গ্লুকোমিটারের মাধ্যমে কোনও কারেন্ট থাকবে না।
যদি emf সেন্সরের মান পরিবর্তন হয়, তাহলে স্লাইডারের স্লাইডার ব্যবহার করে আবার এই কারেন্টের অনুপস্থিতি অর্জন করা প্রয়োজন। এখানে, ভারসাম্য সেতু সার্কিটের মতো, পরিমাপ করা প্যারামিটারের মান, আমাদের ক্ষেত্রে তাপমাত্রা (emf থার্মোকল) স্লাইডিং তারের স্কেল দ্বারা নির্ধারিত হয় এবং এর মোটরের গতিবিধি প্রায়শই একটি বিশেষ বৈদ্যুতিক মোটরের সাহায্যে সঞ্চালিত হয়।
ক্ষতিপূরণ সার্কিটের উচ্চ নির্ভুলতা এই কারণে যে পরিমাপের সময়, সেন্সর দ্বারা উত্পন্ন বৈদ্যুতিক শক্তি খরচ হয় না, যেহেতু এর অন্তর্ভুক্তির সার্কিটে বর্তমান শূন্য। এই সার্কিটটি প্যারামেট্রিক সেন্সরগুলির সাথেও ব্যবহার করা যেতে পারে, তবে তারপরে একটি অতিরিক্ত ডিসি উত্স প্রয়োজন, যা প্যারামেট্রিক সেন্সরের পাওয়ার সাপ্লাই সার্কিটে ব্যবহৃত হয়।