ইলেক্ট্রোম্যাগনেটিক রিলেগুলির মৌলিক পরামিতি এবং বৈশিষ্ট্য
 একটি বৈদ্যুতিক যন্ত্রপাতি যা রিলে নিয়ন্ত্রণ আইন প্রয়োগ করে তাকে একটি রিলে বলা হয়... একটি রিলেতে, যখন নিয়ন্ত্রণ (ইনপুট) প্যারামিটারটি একটি নির্দিষ্ট সেট মানতে মসৃণভাবে পরিবর্তিত হয়, তখন নিয়ন্ত্রিত (আউটপুট) পরামিতি হঠাৎ পরিবর্তন হয়। এছাড়াও, এই পরামিতিগুলির মধ্যে অন্তত একটি বৈদ্যুতিক হতে হবে।
একটি বৈদ্যুতিক যন্ত্রপাতি যা রিলে নিয়ন্ত্রণ আইন প্রয়োগ করে তাকে একটি রিলে বলা হয়... একটি রিলেতে, যখন নিয়ন্ত্রণ (ইনপুট) প্যারামিটারটি একটি নির্দিষ্ট সেট মানতে মসৃণভাবে পরিবর্তিত হয়, তখন নিয়ন্ত্রিত (আউটপুট) পরামিতি হঠাৎ পরিবর্তন হয়। এছাড়াও, এই পরামিতিগুলির মধ্যে অন্তত একটি বৈদ্যুতিক হতে হবে।
কার্যকরী অঙ্গের কর্ম ইলেক্ট্রোম্যাগনেটিক রিলে ডুমুরের চিত্র অনুসারে সনাক্ত করা যেতে পারে। 1. রিসিভিং বডি A চৌম্বকীয় সার্কিট 1 এর কয়েল 2 এ সরবরাহ করা ইনপুট মান (ভোল্টেজ) Uin কে একটি মধ্যবর্তী মানতে রূপান্তর করে, যেমন অ্যাঙ্করের যান্ত্রিক শক্তিতে 3. অ্যাঙ্করের যান্ত্রিক শক্তি FЯ নির্বাহী সংস্থার যোগাযোগ ব্যবস্থার উপর কাজ করে। মধ্যবর্তী মান — অ্যাঙ্কর FЯ-এর বল, ইনপুট মান Uin-এর সমানুপাতিক, একটি সঙ্গে তুলনা করা হয় মধ্যবর্তী বডি B এর স্প্রিং 9 দ্বারা বিকশিত Fpr বলটির প্রদত্ত মান। যখন Uin <Uav, Fya
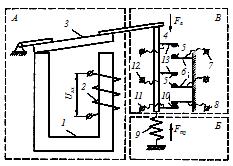 ভাত। 1 ইলেক্ট্রোম্যাগনেটিক রিলে স্কিম
ভাত। 1 ইলেক্ট্রোম্যাগনেটিক রিলে স্কিম
অপারেশনের প্রক্রিয়ায়, একটি টাইম স্কেলে ইলেক্ট্রোম্যাগনেটিক রিলে চারটি পর্যায়কে আলাদা করে: অ্যাকচুয়েশন টাভের সময়কাল (সময়), কাজের সময়কাল দুই, শাটডাউন বন্ধের সময়কাল (সময়), বিশ্রামের সময়কাল (সময়) 2)।
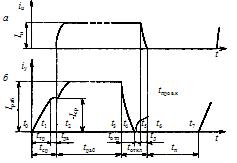
ভাত। 2. সময়মত আউটপুট (a) এবং আউটপুট (b) এর পরিমাণের নির্ভরতা
একটি ইলেক্ট্রোম্যাগনেটিক রিলে এর অ্যাকচুয়েশন পিরিয়ড
 রেসপন্স পিরিয়ডের মধ্যে সময়ের ব্যবধান অন্তর্ভুক্ত থাকে যে মুহূর্ত থেকে ইনপুট সিগন্যাল নিরীক্ষণ বডিকে প্রভাবিত করতে শুরু করে যতক্ষণ না নিয়ন্ত্রিত সার্কিটে সংকেতটি উপস্থিত হয়। অ্যাবসিসা অক্ষ tav = t2 –t0 এর সেগমেন্টটি ডুমুরে এই সময়ের সাথে মিলে যায়। 2, খ. এই মুহুর্তে t0 রিলে কয়েলের কারেন্ট এমন একটি মান পর্যন্ত বৃদ্ধি পায় যেখানে আর্মেচারের উপর কাজ করা ইলেক্ট্রোম্যাগনেটিক বল Fe মধ্যবর্তী বডির স্প্রিং ফোর্স Fm (যান্ত্রিক বল) এর বিরোধিতা করতে শুরু করে। ইনপুট মান তারপর গ্রহণ মান বলা হয়.
রেসপন্স পিরিয়ডের মধ্যে সময়ের ব্যবধান অন্তর্ভুক্ত থাকে যে মুহূর্ত থেকে ইনপুট সিগন্যাল নিরীক্ষণ বডিকে প্রভাবিত করতে শুরু করে যতক্ষণ না নিয়ন্ত্রিত সার্কিটে সংকেতটি উপস্থিত হয়। অ্যাবসিসা অক্ষ tav = t2 –t0 এর সেগমেন্টটি ডুমুরে এই সময়ের সাথে মিলে যায়। 2, খ. এই মুহুর্তে t0 রিলে কয়েলের কারেন্ট এমন একটি মান পর্যন্ত বৃদ্ধি পায় যেখানে আর্মেচারের উপর কাজ করা ইলেক্ট্রোম্যাগনেটিক বল Fe মধ্যবর্তী বডির স্প্রিং ফোর্স Fm (যান্ত্রিক বল) এর বিরোধিতা করতে শুরু করে। ইনপুট মান তারপর গ্রহণ মান বলা হয়.
প্রাথমিক সময়কাল ttr = t1 — t0 সেগমেন্টের সাথে মিলে যায়। T1 সময়ে, রিলে ইলেক্ট্রোম্যাগনেটের আর্মেচার নড়তে শুরু করে। tdv = t2 — t1 চলাকালীন, নোঙ্গরটি নড়াচড়া করে, মধ্যবর্তী বডি B এর প্রতিরোধকে অতিক্রম করে (চিত্র 1 দেখুন) এবং নির্বাহী সংস্থা C সক্রিয় করে।
আর্মেচার স্ট্রোকের শেষে, ড্রাইভের যোগাযোগ বন্ধ হয়ে যায়, (চিত্র 2, ক) লোড কারেন্ট শূন্য থেকে ভারসাম্যের মান পর্যন্ত বাড়তে শুরু করে। যে ইনপুট মান থেকে আউটপুট সার্কিটের নিয়ন্ত্রণ শুরু হয় তাকে গ্রহণযোগ্য মান (Iav) বলা হয়। Isr-এর সাথে সামঞ্জস্যপূর্ণ Psr শক্তিকে অ্যাকচুয়েটিং পাওয়ার বলে।
প্রতিক্রিয়া সময় t cf = ttr + tdv।
ইলেক্ট্রোম্যাগনেটিক রিলেগুলির প্রতিক্রিয়া সময় 1-2 থেকে 20 ms পর্যন্ত পরিবর্তিত হয়। ইলেক্ট্রোম্যাগনেটিক টাইম রিলে 10 সেকেন্ড পর্যন্ত বিলম্ব প্রদান করে।
রিলে এর প্রতিক্রিয়া সময় অনুমান করার জন্য, এক্সপ্রেশন ব্যবহার করা অনুমোদিত
t cf = t1kz-bm –a,
যেখানে t1 একটি প্রদত্ত নিরাপত্তা ফ্যাক্টর ks এবং ফ্যাক্টর m = 1 এর প্রতিক্রিয়া সময়; a, b — সহগ যা রিলে এবং kz এবং m এর মানের উপর নির্ভর করে নির্ধারিত হয়।
kz = 1.5¸2-এ উচ্চ-গতির রিলেগুলির জন্য, a সহগ-এর মান একতাতে পৌঁছায়। k z = 1.5¸3 সহ সাধারণ রিলেগুলির জন্য, মান a = 0.25¸0.95, সহগ b এর মান সাধারণত 1.4-1.6 রেঞ্জের মধ্যে থাকে।
ইলেক্ট্রোম্যাগনেটিক রিলে অপারেটিং সময়কাল
 কাজের সময়ের মধ্যে সময়ের ব্যবধান দুইর্ক = t3 — t2, অর্থাৎ আউটপুট সার্কিট t2 নিয়ন্ত্রণের মুহূর্ত থেকে ইনপুট সংকেত t3 এর সংবেদনশীল অঙ্গের উপর প্রভাবের সমাপ্তির মুহূর্ত পর্যন্ত সময়। কারেন্ট আইওয়ার্কের একটি স্থির মূল্যে উঠতে শুরু করে (চিত্র 2, খ) — এটি ইনপুট মানের কার্যকরী মান, যা রিলেটির নির্ভরযোগ্য অপারেশন নিশ্চিত করে।
কাজের সময়ের মধ্যে সময়ের ব্যবধান দুইর্ক = t3 — t2, অর্থাৎ আউটপুট সার্কিট t2 নিয়ন্ত্রণের মুহূর্ত থেকে ইনপুট সংকেত t3 এর সংবেদনশীল অঙ্গের উপর প্রভাবের সমাপ্তির মুহূর্ত পর্যন্ত সময়। কারেন্ট আইওয়ার্কের একটি স্থির মূল্যে উঠতে শুরু করে (চিত্র 2, খ) — এটি ইনপুট মানের কার্যকরী মান, যা রিলেটির নির্ভরযোগ্য অপারেশন নিশ্চিত করে।
Iwork / Icr = kz অনুপাতকে কর্মক্ষেত্রে নিরাপত্তার ফ্যাক্টর বলা হয়।
রিলে-এর সংবেদনশীল উপাদানের ওভারলোড ক্ষমতা চিহ্নিত করতে, ইনপুট পরিমাণের মান ব্যবহার করা হয়, যাকে অপারেটিং পরিমাণ Ioperating.max এর সীমা মান বলা হয়।
কাজের মূল্যের সীমাবদ্ধতা - এটি তার মান যা সংবেদনশীল অঙ্গটি একটি স্বল্প স্বাভাবিক সময়ের জন্য সহ্য করতে পারে। যাইহোক, বৈদ্যুতিক বা যান্ত্রিক শক্তি বা গরম করার অবস্থার কারণে রিলে স্বাভাবিক মোডে কাজ করলে এই মানটির মান অগ্রহণযোগ্য।
কন্ট্রোল পাওয়ার কনসেপ্ট রু রিলে ড্রাইভের লোড বহন ক্ষমতা চিহ্নিত করতে ব্যবহৃত হয়। কন্ট্রোল পাওয়ার হল নিয়ন্ত্রিত সার্কিটের শক্তি যা ড্রাইভটি দীর্ঘ সময়ের জন্য প্রেরণ করতে পারে।
ইলেক্ট্রোম্যাগনেটিক রিলে ট্রিপ সময়কাল
 অফ পিরিয়ডে টাইম ইন্টারভাল টফ = t6 — t3 থাকে, যেমন বোধগম্য অঙ্গ টি3-এর উপর প্রভাব বন্ধ হওয়ার মুহূর্ত থেকে নিয়ন্ত্রিত সার্কিটে কারেন্ট শূন্যে নেমে যাওয়ার মুহূর্ত পর্যন্ত (চিত্র 16, ক)।
অফ পিরিয়ডে টাইম ইন্টারভাল টফ = t6 — t3 থাকে, যেমন বোধগম্য অঙ্গ টি3-এর উপর প্রভাব বন্ধ হওয়ার মুহূর্ত থেকে নিয়ন্ত্রিত সার্কিটে কারেন্ট শূন্যে নেমে যাওয়ার মুহূর্ত পর্যন্ত (চিত্র 16, ক)।
অফ পিরিয়ডে রিলিজ পিরিয়ড অন্তর্ভুক্ত থাকে totp = t4 — t3 যেখানে রিলে বন্ধ থাকে। রিলে কয়েলের বর্তমান iy শূন্যে নেমে আসে (চিত্র 2, b)। এই সময়ের মধ্যে, বিরোধী স্প্রিং ফোর্স (যান্ত্রিক বল) ইলেক্ট্রোম্যাগনেটিক ফোর্সকে ছাড়িয়ে যায়, অর্থাৎ Fm> Fe এবং আর্মেচার নির্গত হয়।
একটি পরিচিতি ব্যর্থতা নির্বাচন করার পরে (ব্যবধান tc = t5 — t4), রিলে পরিচিতিগুলি খোলে এবং তাদের মধ্যে একটি চাপ প্রজ্বলিত হয়, যা td = t6 — t5 সময়ের পরে নিভে যায়। td সময়কালে, নিয়ন্ত্রিত সার্কিটে কারেন্ট In থেকে শূন্যে কমে যায় (চিত্র 2, a)।
অফ টাইম t t = tp + tc + td.
ট্রিপিং পিরিয়ড একটি রিকভারি ফ্যাক্টর দ্বারা চিহ্নিত করা হয়, যা পিকআপ কারেন্ট Iav থেকে ড্রপ কারেন্ট Iotp-এর অনুপাত: kv = Iotp/Icr।
সাধারণত, পাওয়ার সিস্টেম সুরক্ষা রিলে এবং কন্ট্রোল রিলেগুলির জন্য যা ইনপুট প্যারামিটারকে সংকীর্ণ সীমার মধ্যে নিয়ন্ত্রণ করে, কেভি একতার কাছাকাছি হওয়া উচিত।
ইলেক্ট্রোম্যাগনেটিক রিলে বিশ্রামের সময়কাল
বাকি সময়কাল হল সময়ের ব্যবধান tp = t7 — t6।
লেটেন্সি পিরিয়ডকে একটি প্যারামিটার দ্বারা চিহ্নিত করা হয় যাকে অপারেটিভ মান বলা হয়, যা ইনপুট পরিমাণের সবচেয়ে বড় মান যা নিশ্চিত করে যে রিলেটি কাজ করে না বা আটকে থাকে। শাটডাউন সময় অপারেটিং স্টার্ট-আপ সময় এবং প্রকাশের সময়ের চেয়ে কম।
কন্ট্রোল পাওয়ার এবং অ্যাকচুয়েশন পাওয়ারের অনুপাতকে লাভ বলা হয়, ku = Py/Pcr।
প্রতি ইউনিট সময় শুরুর সংখ্যা একটি মান দ্বারা নির্ধারিত হয় যা চক্র সময়ের বিপরীতভাবে সমানুপাতিক:
f = 1 / tq = 1 / (Tsrab +Trob + Toff +TNS)
লাকোটা ও.বি.