ফ্রিকোয়েন্সি সহ পাম্প ইউনিটের বৈদ্যুতিক ড্রাইভ
 সেন্ট্রিফিউগাল পাম্পের অপারেটিং মোডগুলি তাদের চাকার ঘূর্ণন গতি পরিবর্তন করে সামঞ্জস্য করার জন্য সবচেয়ে বেশি শক্তি সাশ্রয়ী। ড্রাইভ মোটর হিসাবে একটি সামঞ্জস্যযোগ্য বৈদ্যুতিক ড্রাইভ ব্যবহার করা হলে চাকার ঘূর্ণনের গতি পরিবর্তন করা যেতে পারে।
সেন্ট্রিফিউগাল পাম্পের অপারেটিং মোডগুলি তাদের চাকার ঘূর্ণন গতি পরিবর্তন করে সামঞ্জস্য করার জন্য সবচেয়ে বেশি শক্তি সাশ্রয়ী। ড্রাইভ মোটর হিসাবে একটি সামঞ্জস্যযোগ্য বৈদ্যুতিক ড্রাইভ ব্যবহার করা হলে চাকার ঘূর্ণনের গতি পরিবর্তন করা যেতে পারে।
গ্যাস টারবাইন এবং অভ্যন্তরীণ জ্বলন ইঞ্জিনগুলির নকশা এবং বৈশিষ্ট্যগুলি এমন যে তারা প্রয়োজনীয় সীমার মধ্যে ঘূর্ণন গতিতে পরিবর্তন সরবরাহ করতে পারে।
ডিভাইসের যান্ত্রিক বৈশিষ্ট্য ব্যবহার করে প্রতিটি প্রক্রিয়ার ঘূর্ণন গতি সামঞ্জস্য করার প্রক্রিয়াটি সুবিধাজনকভাবে বিশ্লেষণ করা হয়।
একটি পাম্প এবং একটি বৈদ্যুতিক মোটর সমন্বিত একটি পাম্পিং ইউনিটের যান্ত্রিক বৈশিষ্ট্যগুলি বিবেচনা করুন। ডুমুরে। 1 একটি চেক ভালভ (বক্ররেখা 1) এবং একটি কাঠবিড়ালি-খাঁচা রটার (বক্ররেখা 2) সহ একটি বৈদ্যুতিক মোটর দিয়ে সজ্জিত একটি কেন্দ্রাতিগ পাম্পের যান্ত্রিক বৈশিষ্ট্যগুলি দেখায়।
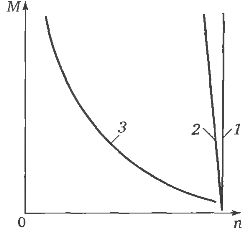
ভাত। 1. পাম্পিং ইউনিটের যান্ত্রিক বৈশিষ্ট্য
বৈদ্যুতিক মোটরের টর্কের মান এবং পাম্পের প্রতিরোধের টর্কের মধ্যে পার্থক্যকে গতিশীল টর্ক বলা হয়।যদি মোটরের ঘূর্ণন সঁচারক বল পাম্পের প্রতিরোধের মুহুর্তের চেয়ে বেশি হয়, তবে গতিশীল ঘূর্ণন সঁচারক বলকে ইতিবাচক হিসাবে বিবেচনা করা হয়, যদি এটি কম হয় তবে এটি নেতিবাচক।
একটি ইতিবাচক গতিশীল মুহূর্তের প্রভাবের অধীনে, পাম্প ইউনিট ত্বরণের সাথে কাজ করতে শুরু করে, যেমন ত্বরান্বিত করে। যদি গতিশীল ঘূর্ণন সঁচারক বল নেতিবাচক হয়, পাম্প ইউনিট একটি বিলম্ব সঙ্গে কাজ করে, i.e. ধীর হয়ে যায়
যখন এই মুহূর্তগুলি সমান হয়, তখন অপারেশনের একটি স্থির মোড সঞ্চালিত হয়, যেমন পাম্প ইউনিট একটি ধ্রুবক গতিতে কাজ করে। এই গতি এবং সংশ্লিষ্ট টর্ক বৈদ্যুতিক মোটর এবং পাম্পের যান্ত্রিক বৈশিষ্ট্যের ছেদ দ্বারা নির্ধারিত হয় (চিত্র 1 এ বিন্দু a)।
যদি কোনো না কোনোভাবে সামঞ্জস্যের প্রক্রিয়ায় যান্ত্রিক বৈশিষ্ট্যের পরিবর্তন হয়, উদাহরণস্বরূপ, বৈদ্যুতিক মোটরের রটার সার্কিটে একটি অতিরিক্ত প্রতিরোধক (চিত্র 1-এ বক্ররেখা 3), বৈদ্যুতিক মোটরের ঘূর্ণন সঁচারক বল প্রবর্তন করে নরম হওয়া। প্রতিরোধের মুহূর্তে ছোট হয়ে যাবে।
একটি নেতিবাচক গতিশীল ঘূর্ণন সঁচারক বল প্রভাব অধীনে, পাম্প ইউনিট একটি বিলম্ব সঙ্গে কাজ শুরু করে, যেমন ধীর হয়ে যায় যতক্ষণ না টর্ক এবং প্রতিরোধের মুহূর্ত আবার ভারসাম্য বজায় থাকে (চিত্র 1-এ বিন্দু বি)। এই বিন্দুটি গতি এবং টর্কের eigenvalue এর সাথে মিলে যায়।
সুতরাং, পাম্পিং ইউনিটের ঘূর্ণনের গতি নিয়ন্ত্রণ করার প্রক্রিয়াটি ক্রমাগত বৈদ্যুতিক মোটরের টর্কের পরিবর্তন এবং পাম্পের প্রতিরোধের মুহুর্তের সাথে থাকে।
পাম্পের গতি নিয়ন্ত্রণ করা যেতে পারে বৈদ্যুতিক মোটরের গতি পরিবর্তন করে, যা পাম্পের সাথে দৃঢ়ভাবে সংযুক্ত, অথবা পাম্পকে বৈদ্যুতিক মোটরের সাথে সংযোগকারী ট্রান্সমিশনের গিয়ার অনুপাত পরিবর্তন করে, যা একটি ধ্রুবক গতিতে চলে।

বৈদ্যুতিক মোটরের ঘূর্ণনের গতি নিয়ন্ত্রণ
এসি মোটর প্রধানত পাম্পিং ইউনিটে ব্যবহৃত হয়। একটি এসি মোটরের ঘূর্ণন গতি নির্ভর করে সরবরাহ কারেন্ট f এর ফ্রিকোয়েন্সি, মেরু জোড়া p এবং স্লিপ s এর উপর। এই প্যারামিটারগুলির এক বা একাধিক পরিবর্তন করে, আপনি বৈদ্যুতিক মোটর এবং এটির সাথে সংযুক্ত পাম্পের গতি পরিবর্তন করতে পারেন।
ফ্রিকোয়েন্সি বৈদ্যুতিক ড্রাইভের প্রধান উপাদান ফ্রিকোয়েন্সি রূপান্তরকারী… বৈদ্যুতিন সংকেতের মেরু বদল একটি ধ্রুবক গ্রিড ফ্রিকোয়েন্সি f1 পরিবর্তনশীল e2 রূপান্তরিত. কম্পাঙ্কের সমানুপাতিক e2 কনভার্টারের আউটপুটের সাথে সংযুক্ত বৈদ্যুতিক মোটরের গতি পরিবর্তন করে।
একটি ফ্রিকোয়েন্সি কনভার্টারের সাথে, প্রধান ভোল্টেজ U1 এবং ফ্রিকোয়েন্সি কার্যত F1 পরিবর্তন করে না পরিবর্তনশীল পরামিতি U2 এবং e2 নিয়ন্ত্রণ ব্যবস্থার জন্য প্রয়োজনীয়। বৈদ্যুতিক মোটরের স্থিতিশীল ক্রিয়াকলাপ নিশ্চিত করার জন্য, বর্তমান এবং চৌম্বকীয় প্রবাহের পরিপ্রেক্ষিতে এর ওভারলোড সীমিত করতে, ফ্রিকোয়েন্সি কনভার্টারে উচ্চ শক্তি সূচক বজায় রাখতে, এর ইনপুট এবং আউটপুট পরামিতিগুলির মধ্যে একটি নির্দিষ্ট অনুপাত বজায় রাখতে হবে এর ধরণের উপর নির্ভর করে। যান্ত্রিক পাম্প বৈশিষ্ট্য। এই সম্পর্কগুলি ফ্রিকোয়েন্সি নিয়ন্ত্রণ আইন সমীকরণ থেকে উদ্ভূত হয়।
পাম্পগুলির জন্য, অনুপাতটি অবশ্যই পর্যবেক্ষণ করা উচিত:
U1/f1 = U2/f2 = const
ডুমুরে। 2 ফ্রিকোয়েন্সি নিয়ন্ত্রণ সহ একটি আনয়ন মোটরের যান্ত্রিক বৈশিষ্ট্য দেখায়।ফ্রিকোয়েন্সি f2 হ্রাস পাওয়ার সাথে সাথে যান্ত্রিক বৈশিষ্ট্যটি কেবল n — M স্থানাঙ্কে এর অবস্থান পরিবর্তন করে না, তবে কিছু পরিমাণে এর আকার পরিবর্তন করে। বিশেষ করে, বৈদ্যুতিক মোটরের সর্বাধিক টর্ক হ্রাস করা হয়। এটি এই কারণে যে U1 / f1 = U2 / f2 = const এর অনুপাত এবং f1 ফ্রিকোয়েন্সি পরিবর্তন মোটর টর্কের মাত্রায় স্টেটরের সক্রিয় প্রতিরোধের প্রভাবকে বিবেচনা করে না।

ভাত। 2. সর্বাধিক (1) এবং হ্রাস (2) ফ্রিকোয়েন্সিতে একটি ফ্রিকোয়েন্সি বৈদ্যুতিক ড্রাইভের যান্ত্রিক বৈশিষ্ট্য
ফ্রিকোয়েন্সি সামঞ্জস্য করার সময়, এই প্রভাবকে বিবেচনায় নিয়ে, সর্বাধিক টর্ক অপরিবর্তিত থাকে, যান্ত্রিক বৈশিষ্ট্যের আকৃতি সংরক্ষিত হয়, কেবল তার অবস্থান পরিবর্তন হয়।
সঙ্গে ফ্রিকোয়েন্সি রূপান্তরকারী পালস প্রস্থ মড্যুলেশন (PWM) কনভার্টারের আউটপুটে সাইনোসয়েডালের কাছে আসা কারেন্ট এবং ভোল্টেজ বক্ররেখার আকৃতি প্রদান করা হয় বলে উচ্চ শক্তির বৈশিষ্ট্য রয়েছে। সম্প্রতি, আইজিবিটি মডিউল (ইনসুলেটেড গেট বাইপোলার ট্রানজিস্টর) ভিত্তিক ফ্রিকোয়েন্সি রূপান্তরকারীগুলি সবচেয়ে বিস্তৃত।
IGBT মডিউল একটি উচ্চ-দক্ষতা মূল উপাদান। এতে কম ভোল্টেজ ড্রপ, উচ্চ গতি এবং কম সুইচিং পাওয়ার রয়েছে। একটি অ্যাসিঙ্ক্রোনাস মোটর নিয়ন্ত্রণের জন্য PWM এবং ভেক্টর অ্যালগরিদম সহ IGBT মডিউলের উপর ভিত্তি করে ফ্রিকোয়েন্সি কনভার্টারের অন্যান্য ধরণের কনভার্টারগুলির তুলনায় সুবিধা রয়েছে। পুরো আউটপুট ফ্রিকোয়েন্সি রেঞ্জের উপর এটির একটি উচ্চ শক্তি ফ্যাক্টর রয়েছে।
রূপান্তরকারীর পরিকল্পিত চিত্র চিত্রে দেখানো হয়েছে। 3.
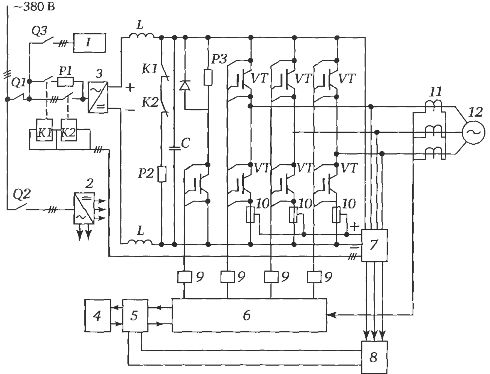
ভাত। 3.আইজিবিটি মডিউলগুলির একটি ফ্রিকোয়েন্সি কনভার্টারের স্কিম: 1 — ফ্যানের ব্লক; 2 — পাওয়ার সাপ্লাই; 3 - অনিয়ন্ত্রিত সংশোধনকারী; 4 - নিয়ন্ত্রণ প্যানেল; 5 - নিয়ন্ত্রণ প্যানেল বোর্ড; 6 — PWM; 7 — ভোল্টেজ রূপান্তর ইউনিট; 8 — সিস্টেম কন্ট্রোল বোর্ড; 9 — ড্রাইভার; 10 — বৈদ্যুতিন সংকেতের মেরু বদল ইউনিটের জন্য ফিউজ; 11 — বর্তমান সেন্সর; 12 — অ্যাসিঙ্ক্রোনাস কাঠবিড়ালি-খাঁচা মোটর; Q1, Q2, Q3 — পাওয়ার সার্কিট, কন্ট্রোল সার্কিট এবং ফ্যান ইউনিটের জন্য সুইচ; K1, K2 — ক্যাপাসিটার এবং পাওয়ার সার্কিট চার্জ করার জন্য কন্টাক্টর; সি - ক্যাপাসিটর ব্যাঙ্ক; Rl, R2, R3 — ক্যাপাসিটরের চার্জ, ক্যাপাসিটরের স্রাব এবং ড্রেন ব্লকের বর্তমান সীমাবদ্ধ করার জন্য প্রতিরোধক; VT - ইনভার্টার পাওয়ার সুইচ (IGBT মডিউল)
ফ্রিকোয়েন্সি কনভার্টারের আউটপুটে, একটি ভোল্টেজ (কারেন্ট) বক্ররেখা গঠিত হয়, একটি সাইনুসয়েড থেকে সামান্য ভিন্ন, উচ্চ হারমোনিক উপাদান ধারণ করে। তাদের উপস্থিতি বৈদ্যুতিক মোটরের ক্ষতি বৃদ্ধির দিকে পরিচালিত করে। এই কারণে, যখন বৈদ্যুতিক ড্রাইভ রেট করা গতির কাছাকাছি গতিতে কাজ করে, তখন বৈদ্যুতিক মোটর ওভারলোড হয়।
কম গতিতে কাজ করার সময়, পাম্প ড্রাইভে ব্যবহৃত স্ব-বাতাসবাহী বৈদ্যুতিক মোটরের শীতল অবস্থার অবনতি হয়। পাম্পিং ইউনিটগুলির স্বাভাবিক নিয়ন্ত্রণ পরিসরে (1: 2 বা 1: 3), বায়ুচলাচল অবস্থার এই অবনতিটি প্রবাহের হার এবং পাম্পের মাথার হ্রাসের কারণে লোডের উল্লেখযোগ্য হ্রাস দ্বারা ক্ষতিপূরণ দেওয়া হয়।
নামমাত্র মানের (50 Hz) কাছাকাছি ফ্রিকোয়েন্সিগুলিতে কাজ করার সময়, উচ্চতর অর্ডারের হারমোনিক্সের উপস্থিতির সাথে একত্রে শীতল অবস্থার অবনতির জন্য অনুমোদিত যান্ত্রিক শক্তি 8-15% হ্রাস করা প্রয়োজন।এই কারণে, বৈদ্যুতিক মোটরের সর্বাধিক টর্ক 1 — 2%, এর কার্যকারিতা — 1 — 4%, cosφ — 5-7% হ্রাস পেয়েছে।
বৈদ্যুতিক মোটর ওভারলোডিং এড়াতে, এর গতির উপরের মান সীমিত করা বা আরও শক্তিশালী বৈদ্যুতিক মোটর দিয়ে ড্রাইভকে সজ্জিত করা প্রয়োজন। শেষ পরিমাপ বাধ্যতামূলক যখন পাম্পিং ইউনিট একটি ফ্রিকোয়েন্সি e2> 50 Hz এ কাজ করার জন্য ডিজাইন করা হয়। ইঞ্জিন বিপ্লবের উপরের মান সীমিত করা ফ্রিকোয়েন্সি e2 48 Hz এ সীমাবদ্ধ করে করা হয়। ড্রাইভ মোটরের রেট করা শক্তির বৃদ্ধি নিকটতম মান মান পর্যন্ত বৃত্তাকার।

পরিবর্তনশীল বৈদ্যুতিক ব্লক ড্রাইভের গ্রুপ নিয়ন্ত্রণ
অনেক পাম্প সেটে কয়েকটি ব্লক থাকে। একটি নিয়ম হিসাবে, সমস্ত ইউনিট একটি সামঞ্জস্যযোগ্য বৈদ্যুতিক ড্রাইভ দিয়ে সজ্জিত করা হয় না। দুটি বা তিনটি ইনস্টল করা ইউনিট থেকে, এটি একটি সামঞ্জস্যযোগ্য বৈদ্যুতিক ড্রাইভ দিয়ে সজ্জিত করার জন্য যথেষ্ট। যদি একটি রূপান্তরকারী স্থায়ীভাবে একটি ইউনিটের সাথে সংযুক্ত থাকে, তবে তাদের মোটর সম্পদের একটি অসম খরচ হয়, যেহেতু একটি পরিবর্তনশীল গতির ড্রাইভের সাথে সজ্জিত ইউনিটটি অনেক বেশি সময়ের জন্য ব্যবহৃত হয়।
স্টেশনে ইনস্টল করা সমস্ত ব্লকের মধ্যে লোডের অভিন্ন বন্টনের জন্য, গ্রুপ কন্ট্রোল স্টেশনগুলি তৈরি করা হয়েছে, যার সাহায্যে ব্লকগুলিকে কনভার্টারের সাথে সিরিজে সংযুক্ত করা যেতে পারে। কন্ট্রোল স্টেশনগুলি সাধারণত কম ভোল্টেজ ইউনিট (380 V) এর জন্য তৈরি করা হয়।
সাধারণত, কম ভোল্টেজ কন্ট্রোল স্টেশন দুটি বা তিনটি ইউনিট নিয়ন্ত্রণ করার জন্য ডিজাইন করা হয়।লো-ভোল্টেজ কন্ট্রোল স্টেশনগুলির মধ্যে রয়েছে সার্কিট ব্রেকার যা ফেজ-ফেজ শর্ট সার্কিট এবং গ্রাউন্ডিংয়ের বিরুদ্ধে সুরক্ষা প্রদান করে, ওভারলোড থেকে ডিভাইসগুলিকে রক্ষা করার জন্য তাপীয় রিলে, পাশাপাশি নিয়ন্ত্রণ সরঞ্জাম (সুইচ, বোতাম পোস্ট এবং অন্যদের.).
কন্ট্রোল স্টেশনের স্যুইচিং সার্কিটে প্রয়োজনীয় ইন্টারলক রয়েছে যা ফ্রিকোয়েন্সি রূপান্তরকারীকে যে কোনও নির্বাচিত ব্লকের সাথে সংযুক্ত হতে এবং পাম্পিং বা ব্লোয়িং ইউনিটের প্রযুক্তিগত মোডকে বিরক্ত না করেই কাজের ব্লকগুলি প্রতিস্থাপন করতে দেয়।
কন্ট্রোল স্টেশন, একটি নিয়ম হিসাবে, পাওয়ার উপাদানগুলির সাথে একসাথে (স্বয়ংক্রিয় সুইচ, কন্টাক্টর, ইত্যাদি) নিয়ন্ত্রণ এবং নিয়ন্ত্রণকারী ডিভাইস (মাইক্রোপ্রসেসর কন্ট্রোলার, ইত্যাদি) ধারণ করে।
গ্রাহকের অনুরোধে, স্টেশনগুলি ব্যাকআপ পাওয়ার (ATS) স্বয়ংক্রিয়ভাবে চালু করার জন্য ডিভাইসগুলি দিয়ে সজ্জিত করা হয়েছে, বিদ্যুতের বাণিজ্যিক পরিমাপ, শাটডাউন সরঞ্জামের নিয়ন্ত্রণ।
প্রয়োজনে, অতিরিক্ত ডিভাইসগুলি নিয়ন্ত্রণ স্টেশনে প্রবর্তন করা হয়, যা ইউনিটগুলির নরম স্টার্টারের ফ্রিকোয়েন্সি রূপান্তরকারীর সাথে একসাথে ব্যবহার নিশ্চিত করে।
স্বয়ংক্রিয় নিয়ন্ত্রণ স্টেশন প্রদান করে:
-
প্রযুক্তিগত পরামিতি (চাপ, স্তর, তাপমাত্রা, ইত্যাদি) এর সেট মান বজায় রাখা;
-
নিয়ন্ত্রিত এবং অ-নিয়ন্ত্রিত ইউনিটের বৈদ্যুতিক মোটরগুলির অপারেটিং মোডগুলির নিয়ন্ত্রণ (ক্ষয়প্রাপ্ত বর্তমান, শক্তি নিয়ন্ত্রণ) এবং তাদের সুরক্ষা;
-
প্রধান ডিভাইসের ব্যর্থতার ক্ষেত্রে ব্যাকআপ ডিভাইসের স্বয়ংক্রিয় শুরু;
-
ফ্রিকোয়েন্সি রূপান্তরকারী ব্যর্থতার ক্ষেত্রে ব্লকগুলি সরাসরি নেটওয়ার্কে স্যুইচ করা;
-
ব্যাকআপ (ATS) বৈদ্যুতিক ইনপুটের স্বয়ংক্রিয় সুইচিং;
-
পাওয়ার সাপ্লাই নেটওয়ার্কে ক্ষতি এবং গভীর ভোল্টেজ কমে যাওয়ার পরে স্টেশনের স্বয়ংক্রিয় পুনঃসংযোগ (AR);
-
একটি নির্দিষ্ট সময়ে কাজ ইউনিট থামানো এবং শুরু করার সাথে স্টেশনের অপারেশন মোডের স্বয়ংক্রিয় পরিবর্তন;
-
একটি অতিরিক্ত অনিয়ন্ত্রিত ইউনিটের স্বয়ংক্রিয় সক্রিয়করণ যদি নিয়ন্ত্রিত ইউনিট, নামমাত্র গতিতে পৌঁছায়, প্রয়োজনীয় জল সরবরাহ না করে;
-
মোটর সংস্থানগুলির অভিন্ন ব্যবহার নিশ্চিত করতে নির্দিষ্ট বিরতিতে কাজের ব্লকগুলির স্বয়ংক্রিয় পরিবর্তন;
-
কন্ট্রোল প্যানেল বা কন্ট্রোল প্যানেল থেকে পাম্পিং (ফুঁ) ইউনিটের অপারেশন মোডের অপারেশনাল নিয়ন্ত্রণ।
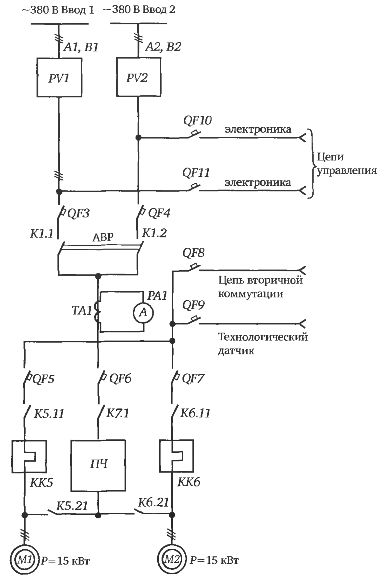
ভাত। 4. পরিবর্তনশীল ফ্রিকোয়েন্সি পাম্পের বৈদ্যুতিক ড্রাইভের গ্রুপ নিয়ন্ত্রণের জন্য স্টেশন
পাম্পিং ইউনিটে পরিবর্তনশীল ফ্রিকোয়েন্সি ব্যবহার করার দক্ষতা
একটি পরিবর্তনশীল ফ্রিকোয়েন্সি ড্রাইভের ব্যবহার আপনাকে উল্লেখযোগ্যভাবে শক্তি সঞ্চয় করতে দেয়, কারণ এটি কম প্রবাহ হারে বড় পাম্পিং ইউনিট ব্যবহার করা সম্ভব করে তোলে। এর জন্য ধন্যবাদ, ইউনিটগুলির ইউনিট ক্ষমতা বৃদ্ধি করে, তাদের মোট সংখ্যা হ্রাস করা এবং তদনুসারে, ভবনগুলির সামগ্রিক মাত্রা হ্রাস করা, স্টেশনের জলবাহী স্কিমকে সরল করা এবং পাইপলাইনের সংখ্যা হ্রাস করা সম্ভব। ভালভ
এইভাবে, পাম্পিং ইউনিটগুলিতে সামঞ্জস্যযোগ্য বৈদ্যুতিক ড্রাইভের ব্যবহার, বিদ্যুৎ এবং জল সংরক্ষণের পাশাপাশি, পাম্পিং ইউনিটের সংখ্যা হ্রাস করতে, স্টেশনের জলবাহী সার্কিটকে সরল করতে এবং পাম্পিং স্টেশনের বিল্ডিংয়ের নির্মাণের পরিমাণ হ্রাস করতে দেয়।এই সংযোগে, গৌণ অর্থনৈতিক প্রভাব দেখা দেয়: বিল্ডিংয়ের গরম, আলো এবং মেরামতের ব্যয় হ্রাস করা হয়, স্টেশনগুলির উদ্দেশ্য এবং অন্যান্য নির্দিষ্ট অবস্থার উপর নির্ভর করে হ্রাসকৃত ব্যয় 20-50% হ্রাস করা যেতে পারে।
ফ্রিকোয়েন্সি কনভার্টারগুলির জন্য প্রযুক্তিগত ডকুমেন্টেশন দেখায় যে পাম্পিং ইউনিটগুলিতে একটি সামঞ্জস্যযোগ্য বৈদ্যুতিক ড্রাইভের ব্যবহার আপনাকে পরিষ্কার এবং বর্জ্য জল পাম্প করার জন্য ব্যয় করা শক্তির 50% পর্যন্ত সঞ্চয় করতে দেয় এবং পরিশোধের সময়কাল তিন থেকে নয় মাস।
একই সময়ে, অপারেটিং পাম্প ইউনিটগুলিতে নিয়ন্ত্রিত বৈদ্যুতিক ড্রাইভের কার্যকারিতার গণনা এবং বিশ্লেষণ দেখায় যে 75 কিলোওয়াট পর্যন্ত শক্তি সহ ইউনিট সহ ছোট পাম্প ইউনিটগুলির জন্য, বিশেষত যখন তারা একটি বড় স্ট্যাটিক চাপ উপাদানের সাথে কাজ করে, এটি দেখা যাচ্ছে নিয়ন্ত্রিত বৈদ্যুতিক ড্রাইভ ব্যবহার করার জন্য উপযুক্ত নয়। এই ক্ষেত্রে, আপনি থ্রটলিং ব্যবহার করে, কর্মরত পাম্প ইউনিটের সংখ্যা পরিবর্তন করে সহজ নিয়ন্ত্রণ ব্যবস্থা ব্যবহার করতে পারেন।
পাম্প ইউনিট অটোমেশন সিস্টেমে পরিবর্তনশীল বৈদ্যুতিক ড্রাইভের ব্যবহার, একদিকে, শক্তি খরচ হ্রাস করে, এবং অন্যদিকে, অতিরিক্ত মূলধন খরচ প্রয়োজন, তাই পাম্প ইউনিটগুলিতে পরিবর্তনশীল বৈদ্যুতিক ড্রাইভ ব্যবহারের সম্ভাবনা হ্রাস করা খরচের তুলনা করে নির্ধারিত হয়। দুটি বিকল্পের মধ্যে: মৌলিক এবং নতুন। একটি সামঞ্জস্যযোগ্য বৈদ্যুতিক ড্রাইভের সাথে সজ্জিত একটি পাম্পিং ইউনিট একটি নতুন বিকল্প হিসাবে নেওয়া হয় এবং একটি ইউনিট যার ইউনিটগুলি ধ্রুবক গতিতে কাজ করে তাকে প্রধান হিসাবে নেওয়া হয়।