ফাউন্ড্রি অটোমেশন সিস্টেমে অ্যাকচুয়েটর
স্বয়ংক্রিয় প্রক্রিয়া নিয়ন্ত্রণ ব্যবস্থায় অ্যাকচুয়েটরগুলি নিয়ন্ত্রিত বস্তু বা এর নিয়ন্ত্রণগুলিকে সরাসরি প্রভাবিত করার জন্য ডিজাইন করা হয়েছে।
প্রয়োজনীয়তা
ড্রাইভগুলি অবশ্যই নিম্নলিখিত প্রয়োজনীয়তাগুলি পূরণ করবে:
-
যতটা সম্ভব রৈখিক স্ট্যাটিক বৈশিষ্ট্য আছে;
-
অপারেশনের সমস্ত মোডে নিয়ন্ত্রণ বস্তু বা এর অঙ্গগুলিকে গতিশীল করার জন্য পর্যাপ্ত ক্ষমতা রয়েছে;
-
প্রয়োজনীয় কর্মক্ষমতা আছে;
-
উত্পাদন মূল্যের সহজতম এবং সবচেয়ে অর্থনৈতিক নিয়ন্ত্রণ নিশ্চিত করতে;
-
কম স্টিয়ারিং ক্ষমতা আছে।
ফাউন্ড্রিতে কাজ করার সময় বৈশিষ্ট্য

ফাউন্ড্রি প্রক্রিয়াগুলির জন্য অটোমেশন সিস্টেম দুটি নিয়ন্ত্রণ মোডের উপস্থিতি দ্বারা চিহ্নিত করা হয়: দূরবর্তী এবং স্বয়ংক্রিয়।
রিমোট কন্ট্রোল সিস্টেমে ড্রাইভের জন্য, প্রধান সূচকগুলি হল শক্তি, উপরন্তু, কর্মক্ষম, কাঠামোগত এবং অর্থনৈতিক বৈশিষ্ট্য প্রয়োজন।
স্বয়ংক্রিয় নিয়ন্ত্রণ ব্যবস্থায় ড্রাইভের জন্য, সবচেয়ে গুরুত্বপূর্ণ হল তাদের স্ট্যাটিক এবং গতিশীল বৈশিষ্ট্য, যা নিয়ন্ত্রণের স্থিতিশীলতা এবং গুণমানকে প্রভাবিত করে। কাস্টিং প্রক্রিয়াগুলির জন্য অটোমেশন সিস্টেমে অ্যাকুয়েটরদের পছন্দের এই বৈশিষ্ট্যগুলি অবশ্যই তাদের নকশায় বিবেচনায় নেওয়া উচিত।
ড্রাইভের প্রধান শক্তি পরামিতি (রিমোট কন্ট্রোল) হল নামমাত্র টর্ক (নামমাত্র নিয়ন্ত্রণে বিকশিত বল) এবং স্টার্টিং টর্ক (নামমাত্র নিয়ন্ত্রণ সংকেতের কর্মের অধীনে স্যুইচ করার মুহূর্তে বিকশিত বল)।
ড্রাইভের জড়তা হ্রাসের মুহুর্তের সাথে প্রারম্ভিক টর্কের অনুপাত তার জড়তা নির্ধারণ করে, অর্থাৎ, আন্দোলনের শুরু থেকে একটি স্থির অবস্থায় আউটপুট উপাদানটির চলাচলের নামমাত্র গতি পর্যন্ত সময়। ত্বরণ সময় কমাতে, স্টার্টিং টর্ক 2 - 2.5 রেটেড টর্কের বেশি হওয়া উচিত নয়।

পজিশনাল কন্ট্রোল সিস্টেমে যেখানে কন্ট্রোল অ্যাকশনের দুটি সেটপয়েন্ট থাকে, অ্যাকচুয়েটরদের অবশ্যই সর্বোচ্চ মান থেকে কন্ট্রোল অ্যাকশন পরিবর্তন করার ক্ষমতা প্রদান করতে হবে।
ধ্রুবক গতির নিয়ন্ত্রকগুলির সাথে সিস্টেমে, বস্তুর উপর নিয়ন্ত্রণ ক্রিয়া নিয়ন্ত্রক সংস্থার চলাচলের সময় দ্বারা নির্ধারিত হয়, যার স্থানান্তর গতি অ্যাকুয়েটরগুলির প্রযুক্তিগত ডেটার উপর নির্ভর করে।
আনুপাতিক নিয়ন্ত্রণ ব্যবস্থায়, বস্তুর উপর নিয়ন্ত্রণ ক্রিয়া সেট মান থেকে প্যারামিটারের বিচ্যুতির সমানুপাতিক, এবং আনুপাতিকতা ফ্যাক্টর অ্যাকুয়েটর, ব্রেকিং ডিভাইস এবং ট্রিপের পরে ট্রিপের নকশার উপর নির্ভর করে।
ফাউন্ড্রি প্রক্রিয়াগুলির জন্য বেশ কয়েকটি স্বয়ংক্রিয় নিয়ন্ত্রণ ব্যবস্থায়, অ্যাকুয়েটরগুলি নিয়ন্ত্রকের অবস্থানের প্রতিক্রিয়া দ্বারা আচ্ছাদিত হয়। ড্রাইভগুলির স্থির এবং গতিশীল বৈশিষ্ট্যগুলির একটি উন্নত মূল্যায়ন তাদের নির্ভুলতা এবং গতি বিবেচনা করে করা হয়।
অ্যাকুয়েটর ডিজাইন করার সময়, নামমাত্র লোডে এর আউটপুট ডিভাইসের গতিবিধি এবং আউটপুট ডিভাইসের চলাচলের নামমাত্র গতির সাথে সম্পর্কিত একটি নিয়ন্ত্রণ সংকেত সেট করা প্রয়োজন।
ফাউন্ড্রি অটোমেশন সিস্টেমে বিভিন্ন ধরনের অ্যাকুয়েটর ব্যবহার করা হয়। নকশা দ্বারা, তারা ইলেক্ট্রোমেকানিকাল, ইলেক্ট্রোম্যাগনেটিক, জলবাহী, বায়ুসংক্রান্ত এবং একত্রে বিভক্ত।
ইলেক্ট্রোমেকানিক্যাল ড্রাইভ
ইলেক্ট্রোমেকানিক্যাল ড্রাইভগুলি অটোমেশন সিস্টেমের বিভিন্ন স্টপিং এবং নিয়ন্ত্রক কার্যকারী সংস্থাগুলিকে নিয়ন্ত্রণ করতে ব্যবহৃত হয়। কিটগুলির মধ্যে একটি বৈদ্যুতিক মোটর, গিয়ারবক্স, লিমিট সুইচ, টর্ক লিমিটিং ক্লাচ এবং ফিডব্যাক সেন্সর অন্তর্ভুক্ত থাকতে পারে।

ইলেক্ট্রোমেকানিক্যাল ড্রাইভের মধ্যে রয়েছে স্বয়ংক্রিয়ভাবে ঢালার জন্য বালতি বাঁকানো, মিক্সিং এবং মিক্সিং সিস্টেমে ডিসপেনসার ওজন করার জন্য হপার খোলা এবং বন্ধ করার জন্য ডিভাইস, চার্জিং স্মেল্টার ইত্যাদি।

এই কাস্টিং প্রক্রিয়াগুলিতে, ইলেক্ট্রোমেকানিকাল ড্রাইভগুলি প্রদান করে:
-
"বন্ধ" এবং "ওপেন" স্টার্ট বোতাম ব্যবহার করে বৈদ্যুতিক ড্রাইভের দূরবর্তী বা স্বয়ংক্রিয় সূচনা;
-
সীমা সুইচের বোতাম বা পরিচিতিগুলির মাধ্যমে যেকোনো মধ্যবর্তী অবস্থানে বৈদ্যুতিক ড্রাইভ বন্ধ করা;
-
গুরুতর ওভারলোডের ক্ষেত্রে জরুরী শাটডাউন;
-
ওয়ার্কিং বডির শেষ পজিশনের রিমোট লাইট সিগন্যালিং (লিফট, ফড়িং এর নিচে, ঢালা লাডল, ইত্যাদি;
-
অন্যান্য প্রক্রিয়া দ্বারা বৈদ্যুতিক ব্লকিং।
ইলেক্ট্রোম্যাগনেটিক ড্রাইভ
ইলেক্ট্রোম্যাগনেটিক ড্রাইভ হল একটি ইলেক্ট্রোম্যাগনেটের সংমিশ্রণ এবং এটি দ্বারা সরানো একটি যান্ত্রিক যন্ত্র। তারা নিয়ন্ত্রিত অঙ্গের ড্রাইভে অগ্রসর গতি প্রদান করে।

ইলেক্ট্রোম্যাগনেটিক অ্যাকচুয়েটরগুলি অটোমেশন সিস্টেমগুলিতে ভালভ, গেট, ভালভ এবং স্পুলগুলি নিয়ন্ত্রণ করতে ব্যবহৃত হয় যাতে গম্বুজ জেট সরবরাহ, গরম করা, ইস্পাত তৈরির প্রক্রিয়াতে অক্সিজেন সরবরাহ নিয়ন্ত্রণ করা হয়। ইলেক্ট্রো-হাইড্রোলিক বা ইলেক্ট্রো-নিউমেটিক ডিভাইস, যাতে সোলেনয়েড নিয়ন্ত্রণ ভালভকে সরিয়ে দেয়, ইত্যাদি।
সোলেনয়েড ভালভ এবং ভালভের অসুবিধা হল যে প্রায় তাত্ক্ষণিক স্যুইচিংয়ের সাথে, জলের হাতুড়ি ঘটতে পারে।
হাইড্রোলিক ড্রাইভ
হাইড্রোলিক অ্যাকুয়েটরগুলি স্বয়ংক্রিয় ঢালাই লাইন এবং সিস্টেমে ব্যাপকভাবে ব্যবহৃত হয় কারণ তারা 5 - 7 বার ওভারলোডের উল্লেখযোগ্য স্বল্পমেয়াদী ক্রিয়াগুলিকে অনুমতি দেয়, ছোট আকারে বড় আউটপুট মোমেন্ট (ফোর্স) থাকে এবং 20,000 রেডের বেশি কৌণিক ত্বরণ প্রদান করতে পারে। / সে.
সর্বাধিক ব্যবহৃত হাইড্রোলিক পিস্টন ড্রাইভ, যেখানে পেট্রোলিয়াম তেল, কৃত্রিম তরল, অ্যালকোহল-গ্লিসারিন মিশ্রণ ইত্যাদি কার্যকরী তরল হিসাবে ব্যবহৃত হয়।
কাস্টিং সিস্টেমে, সর্বাধিক ব্যবহৃত পিস্টন ড্রাইভগুলি একক এবং ডাবল অ্যাক্টিং।
হাইড্রোলিক ড্রাইভের অসুবিধাগুলির মধ্যে রয়েছে তাদের বড় ভর, নিয়ন্ত্রণের জন্য উল্লেখযোগ্য শক্তি খরচ এবং দুর্ঘটনা দূর করতে অসুবিধা।
কিছু প্রধান ত্রুটিগুলি সংশোধন করার জন্য, ব্রেকিং পদ্ধতি এবং আইনের নির্বাচন এবং ফাউন্ড্রিতে ব্যবহৃত হাইড্রোলিক সিলিন্ডারগুলির ব্রেকিং ডিভাইসগুলির ডিজাইন প্যারামিটারগুলির গণনা বিশেষ গুরুত্ব বহন করে।
নির্দিষ্ট জলবাহী সিলিন্ডার এবং ব্রেক ডিভাইসের পছন্দ তাদের কাজ করার পদ্ধতি দ্বারা নির্ধারিত হয়। কম গতিতে, লিমিটারের বিরুদ্ধে কাঠামো বা সরঞ্জামের চলমান অংশগুলির ব্রেকিং সহ ব্রেক ডিভাইস ছাড়াই হাইড্রোলিক সিলিন্ডারগুলি চালানোর অনুমতি দেওয়া হয়। যখন কাজের গতি 80 মিমি / সেকেন্ডে বৃদ্ধি পায়, তখন ব্রেকিং ডিভাইসগুলি ব্যবহার করা প্রয়োজন।
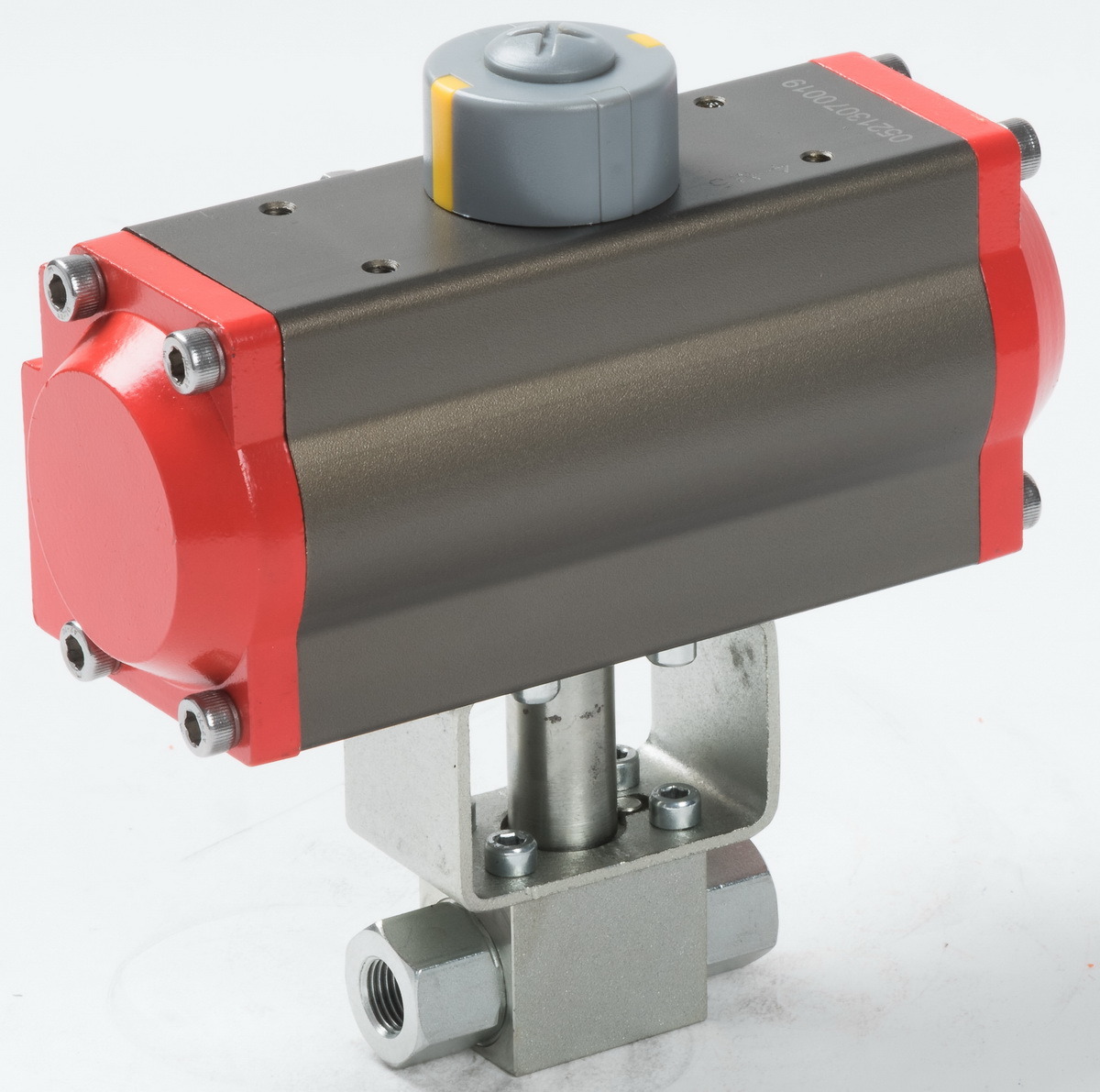
বায়ুসংক্রান্ত ড্রাইভ

বায়ুসংক্রান্ত ড্রাইভ জলবাহী হিসাবে একই ভাবে নির্মাণ. তাদের পার্থক্যগুলি কাজের মাধ্যমের বৈশিষ্ট্যগুলির মধ্যে রয়েছে (গ্যাস এবং তরল)। গ্যাসের সংকোচনযোগ্যতা সিস্টেমের অপারেশনে নেতিবাচক প্রভাব ফেলে, বিশেষ করে উল্লেখযোগ্য লোড এবং ত্বরণের অধীনে।
বায়ুসংক্রান্ত ড্রাইভগুলি পিস্টন এবং ডায়াফ্রামে বিভক্ত। বায়ুসংক্রান্ত পিস্টন অ্যাকুয়েটরগুলি তাদের সরলতা এবং কম খরচের কারণে ফাউন্ড্রিতে সাধারণ।
একই সময়ে, ঢালাই প্রক্রিয়ার আক্রমনাত্মক পরিবেশ ডিজাইনারদের স্বয়ংক্রিয় ঢালাই মেশিনের জন্য বিশেষ বায়ুসংক্রান্ত সিলিন্ডার বিকাশ করতে বাধ্য করে। এই ধরনের বায়ুসংক্রান্ত সিলিন্ডারগুলি একটি বদ্ধ নকশায় তৈরি করা হয় যেখানে তাদের রডগুলি পরিবেশের সংস্পর্শে আসে না।
তারা আউটপুট শ্যাফ্টের একটি গিয়ারের সাথে একক রাক দ্বারা সংযুক্ত একমুখী সিলিন্ডার ব্যবহার করে। শ্যাফ্টের ঘূর্ণন ক্র্যাঙ্ক দ্বারা রৈখিক গতিতে রূপান্তরিত হয় এবং যদিও দ্বিগুণ রূপান্তরের ফলে শক্তি হ্রাস পায়, এই প্রক্রিয়াগুলি টেকসই।
সম্মিলিত actuators

ফেস্টোর নতুন ডিভাইসগুলি আপনাকে সহজ মোটর চালিত নড়াচড়ার মাধ্যমে কাজগুলি সমাধান করতে এবং IO-Link-এর মাধ্যমে একটি নিয়ামক থেকে PLC-তে বুদ্ধিমত্তার সাথে ডেটা বিনিময় করতে দেয়৷ বৈদ্যুতিক ড্রাইভের এই সিরিজটি বৈদ্যুতিক অটোমেশনের সুবিধার সাথে বায়ুবিজ্ঞানের সরলতাকে একত্রিত করে।
সরলীকৃত মোশন সিরিজের বৈদ্যুতিক ড্রাইভগুলি সাধারণ কাজের জন্য সমন্বিত মোটরাইজেশন এবং নিয়ন্ত্রণ সহ মোশন সমাধান। তারা আপনাকে "প্লাগ এবং প্লে" নীতিতে সফ্টওয়্যার ছাড়াই পরিচালনা এবং কমিশন করার অনুমতি দেয়।
ফিড এবং রিটার্ন স্পিড, অ্যাকচুয়েশন ফোর্স, এন্ড পজিশন সেটিং, ড্যাম্পিং এবং ম্যানুয়াল কন্ট্রোলের প্যারামিটার সরাসরি ফিজিক্যাল বোতাম ব্যবহার করে ড্রাইভে সেট করা যেতে পারে।
পছন্দ
ফাউন্ড্রি অটোমেশন সিস্টেমের জন্য অ্যাকুয়েটর নির্বাচন করার সময়, তাদের গতি, দক্ষতা, শান্ত অপারেশন বিবেচনা করুন। এই মেট্রিক্সগুলির প্রতিটি, একটি ডিগ্রী বা অন্য, একটি নির্দিষ্ট অটোমেশন সমস্যা সমাধানের জন্য গুরুত্বপূর্ণ হতে পারে।
যাইহোক, একটি প্রধান মাপকাঠি রয়েছে যেটিকে যেকোনো অ্যাকচুয়েটরের নকশা বা নির্বাচনের ক্ষেত্রে অগ্রাধিকার দেওয়া উচিত - সেটি হল উচ্চ নির্ভরযোগ্যতা।
এই বিষয়ে, যখনই সম্ভব, সহজ কাইনেমেটিক স্কিম সহ ইলেক্ট্রোম্যাগনেটিক এবং ইলেক্ট্রোমেকানিকাল ড্রাইভগুলি আরও ব্যাপকভাবে ব্যবহার করার পরামর্শ দেওয়া হয়।
যেসব ক্ষেত্রে হাইড্রোলিক বা বায়ুসংক্রান্ত ড্রাইভ ব্যবহার করা হয়, সেক্ষেত্রে সিলিং ডিভাইসগুলির নির্ভরযোগ্যতা এবং চলমান অংশগুলির ভর হ্রাসের দিকে মনোযোগ দিতে হবে।
আরো দেখুন: ফাউন্ড্রিতে পরিমাপ এবং নিয়ন্ত্রণের প্রযুক্তিগত উপায়