অ্যাসিঙ্ক্রোনাস ভালভ ক্যাসকেড সহ বৈদ্যুতিক ড্রাইভ
 শিল্পে, একটি অগভীর গতির সমন্বয় পরিসীমা (3:2:1) সহ একটি ড্রাইভ ব্যবহার করা হয়, অর্থাৎ তথাকথিত ভালভ ক্যাসকেড, একটি অ্যাসিঙ্ক্রোনাস বৈদ্যুতিক মোটরের ভিত্তিতে নির্মিত এবং সামঞ্জস্যযোগ্য পরিবর্তনশীল ড্রাইভের একটি সিস্টেমের প্রতিনিধিত্ব করে।
শিল্পে, একটি অগভীর গতির সমন্বয় পরিসীমা (3:2:1) সহ একটি ড্রাইভ ব্যবহার করা হয়, অর্থাৎ তথাকথিত ভালভ ক্যাসকেড, একটি অ্যাসিঙ্ক্রোনাস বৈদ্যুতিক মোটরের ভিত্তিতে নির্মিত এবং সামঞ্জস্যযোগ্য পরিবর্তনশীল ড্রাইভের একটি সিস্টেমের প্রতিনিধিত্ব করে।
থ্রটল এবং ফ্রিকোয়েন্সি রেগুলেশনের বিপরীতে, একটি ক্যাসকেড সংযোগ সহ, একটি অ্যাসিঙ্ক্রোনাস বৈদ্যুতিক মোটর একটি তিন-ফেজ বিকল্প বর্তমান সরবরাহ নেটওয়ার্কের সাথে সংযুক্ত থাকে। এটি প্রথম দুটির তুলনায় এই ড্রাইভ সিস্টেমের একটি বড় সুবিধা। অন্যান্য সমস্ত সিস্টেমের তুলনায় এটির দক্ষতাও বেশি। এই সুবিধাটি এই সত্য দ্বারা ব্যাখ্যা করা যেতে পারে যে ক্যাসকেড সিস্টেমে শুধুমাত্র স্লিপ শক্তি রূপান্তরিত হয়, যখন ডিসি ড্রাইভ এবং পরিবর্তনশীল ফ্রিকোয়েন্সি সিস্টেমে, মোটর দ্বারা ব্যবহৃত শক্তির সম্পূর্ণ পরিমাণ রূপান্তর সাপেক্ষে।
থ্রোটল এবং রিওস্ট্যাট অ্যাকচুয়েটর, সেইসাথে স্লিপ ক্লাচের তুলনায়, যেখানে স্লিপ শক্তি তাদের দ্বারা প্রতিরোধে হারিয়ে যায়, শক্তির ক্ষেত্রে ভালভ ক্যাসকেডের সুবিধাগুলি আরও বেশি।এই সিস্টেমের রটার সার্কিটে রূপান্তরকারী শুধুমাত্র গতি নিয়ন্ত্রণের জন্য পরিবেশন করে। ড্রাইভ, একটি অ্যাসিঙ্ক্রোনাস মোটর ব্যবহার করে নির্মিত, আপনাকে পরিবর্তনশীল শক্তি সহ উচ্চ-গতির সিস্টেম তৈরি করতে দেয়। এই ধরনের সিস্টেমগুলি মসৃণ গতি এবং ঘূর্ণন সঁচারক বল নিয়ন্ত্রণ প্রদান করে, বিপুল সংখ্যক শক্তি এবং যোগাযোগ সরঞ্জামের প্রয়োজন হয় না।
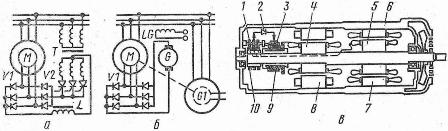
ভাত। 1. ক্যাসকেডের স্কিম: a — ভালভ, b — ভালভ মেশিন, c — একক-বডি ভালভ মেশিন
ভালভ ক্যাসকেডের কম নিয়ন্ত্রণ শক্তিও রয়েছে, সহজে স্বয়ংক্রিয় এবং ভাল গতিশীল বৈশিষ্ট্য রয়েছে।
এটি লক্ষ করা উচিত যে ভালভ ক্যাসকেডে, রটার সার্কিটের ফ্রিকোয়েন্সি রূপান্তরকারী ইন্ডাকশন মোটরের একটি ঘূর্ণায়মান চৌম্বকীয় প্রবাহ তৈরি করতে প্রতিক্রিয়াশীল শক্তি সঞ্চালন করে না, যেহেতু এই প্রবাহটি স্টেটর সার্কিটে প্রবেশকারী প্রতিক্রিয়াশীল শক্তি দ্বারা তৈরি হয়।
উপরন্তু, ভালভ পর্যায়ে ব্যবহৃত কনভার্টারটি শুধুমাত্র প্রদত্ত নিয়ন্ত্রণ পরিসরের সমানুপাতিক শক্তির জন্য ডিজাইন করা হয়েছে। একই সময়ে, ফ্রিকোয়েন্সি নিয়ন্ত্রণ সহ সিস্টেমগুলিতে, রূপান্তরকারী চৌম্বকীয় প্রবাহ তৈরিতে জড়িত এবং এর নকশায় ড্রাইভের সম্পূর্ণ শক্তি বিবেচনা করা প্রয়োজন। সবচেয়ে সহজ ভালভ স্টেজ সার্কিট হল একটি মধ্যবর্তী ডিসি সার্কিট এবং একটি ভালভ EMF কনভার্টার সহ একটি সার্কিট।
ভালভ সার্কিট (Fig. A) এবং ভালভ-মেশিন ক্যাসকেডগুলিতে (Fig. B), একটি তিন-ফেজ ব্রিজ সার্কিট অনুযায়ী রটার কারেন্ট সংশোধন করা হয়, এবং একটি অতিরিক্ত EMF প্রথম হাউজিং-এ সংশোধন করা বর্তমান সার্কিটে প্রবর্তন করা হয়। ভালভ কনভার্টার, এবং দ্বিতীয় - ডিসি মেশিন থেকে। চিত্রে দেখানো সার্কিট। a, একটি ফেজ রটার সহ একটি ইন্ডাকশন মোটর M নিয়ে গঠিত।
একটি ভালভ রূপান্তরকারী V1 রটার সার্কিটে অন্তর্ভুক্ত করা হয়েছে, যেখানে রটার এসি কারেন্ট সংশোধন করা হয়।একটি ভালভ রূপান্তরকারীর সাথে, একটি বৈদ্যুতিন সংকেতের মেরু বদল (ভালভ রূপান্তরকারী V2) থ্রোটল L এর মাধ্যমে চালু করা হয়, যা অতিরিক্ত EMF এর উৎস। ভালভ কনভার্টার V2 একটি ট্রান্সফরমার টি দিয়ে তিন-ফেজ নিরপেক্ষ সার্কিট অনুযায়ী একত্রিত হয়। সাধারণত ছোট ডিভাইসে ব্যবহৃত হয়।
এই চিত্রে, দুটি ভালভ রূপান্তরকারীর কাজগুলি স্পষ্টভাবে বর্ণনা করা হয়েছে। এখানে VI ভালভগুলি সংশোধনকারী হিসাবে কাজ করে, স্লিপ ফ্রিকোয়েন্সি রটার অল্টারনেটিং কারেন্টকে সরাসরি কারেন্টে রূপান্তর করে। ভালভ V2 স্ট্যান্ডিং রটারের কারেন্টকে নেটওয়ার্কের ফ্রিকোয়েন্সিতে বিকল্প কারেন্টে রূপান্তর করে, অর্থাৎ তারা একটি নির্ভরশীল বৈদ্যুতিন সংকেতের মেরু বদল মোডে কাজ করে।
ভালভ-মেশিন ক্যাসকেডে (চিত্র সি), ভালভ কনভার্টার V1 দ্বারা সংশোধিত রটার কারেন্টকে নেটওয়ার্কের ফ্রিকোয়েন্সি সহ একটি বিকল্প কারেন্টে রূপান্তর একটি সরাসরি কারেন্ট মেশিন G এবং একটি সিঙ্ক্রোনাস জেনারেটর G1 এর সাহায্যে সঞ্চালিত হয়। . এই সার্কিটে, মেশিন G এবং G1 একটি বৈদ্যুতিন সংকেতের মেরু বদল হিসাবে ভূমিকা পালন করে।
অ্যাসিঙ্ক্রোনাস ভালভ ক্যাসকেডের বিভিন্ন স্কিম তৈরি করা হয়েছে, তবে মৌলিক এবং সবচেয়ে সাধারণ স্কিমটি চিত্রে দেখানো হয়েছে। আগ্রহের বিষয় হল 13 কিলোওয়াট ক্ষমতা সহ AMVK-13-4 একক ঘের। একটি ক্ষেত্রে, একটি ফেজ রটার সহ একটি ইন্ডাকশন মোটর, একটি ডিসি মেশিন এবং অনিয়ন্ত্রিত ভালভের একটি রটার গ্রুপ এই জাতীয় ক্যাসকেডে স্থাপন করা হয়।
ডিভাইসটি স্টেপলেস গতি নিয়ন্ত্রণ সহ একটি এসি মোটর। এই ডিভাইসগুলি উল্লেখযোগ্য ওভারলোডগুলি কাটিয়ে উঠতে পারে। ক্যাসকেডের নামমাত্র গতি 1400 মিনিট-1, একটি সরবরাহ ভোল্টেজ 380 V এবং একটি সমন্বয় পরিসীমা 1400-650 মিনিট-1 স্টেটর সার্কিট স্যুইচ না করে।
স্টেটর উইন্ডিং স্টার থেকে ডেল্টায় স্যুইচ করার সময়, কন্ট্রোল রেঞ্জ হবে 1400-400 মিনিট-1, টর্ক ধ্রুবক, ইউনিটের ওজন 360 কেজি, উত্তেজনা ভোল্টেজ 220 V।ডিভাইসটিতে একটি সুরক্ষিত প্রস্ফুটিত নির্মাণ রয়েছে। এই ইউনিটগুলি ড্রাইভ ইউনিটগুলিতে প্রযোজ্য।
একটি শরীর সহ একটি ভালভ-মেশিন ক্যাসকেডের একটি পরিকল্পিত বিন্যাস চিত্রে দেখানো হয়েছে। v. একটি অ্যাসিঙ্ক্রোনাস বৈদ্যুতিক মোটরের রটার 5 এবং একটি ডিসি মেশিনের আর্মেচার 4 একটি শ্যাফ্টে মাউন্ট করা হয়। একটি সাধারণ স্টিলের নলাকার বেড 6-এ, অ্যাসিঙ্ক্রোনাস বৈদ্যুতিক মোটরের স্টেটর 7 এবং ডিসি মেশিনের খুঁটি 8 মাউন্ট করা হয়। সংগ্রাহক 9 এবং স্লাইডিং রিং 10, সংগ্রাহক ব্রাশ 3 এবং অ্যাসিঙ্ক্রোনাস মোটরের ব্রাশ 1 সিলিকন রেকটিফায়ারের মাধ্যমে সংযুক্ত থাকে 2। মেশিন থেকে তাপ অপসারণ করতে, বিশেষ করে কম গতিতে, রটারে এবং ফ্রেমে বিশেষ বায়ুচলাচল চ্যানেল রয়েছে।
ডিসি মেশিন আর্মেচারে সংশোধন করা রটার ভোল্টেজ সরবরাহকারী ব্রিজ রেকটিফায়ারটিকে 150 V এর বিপরীত ভোল্টেজ সহ ছয়টি VK-50-1.5 ভালভ থেকে একত্রিত করা হয়। যেখানে শক্তি সঞ্চয় অপরিহার্য।
বিবেচিত সিস্টেমগুলির বর্ণিত সুবিধাগুলির পাশাপাশি, তাদের অসুবিধাগুলিও নোট করা প্রয়োজন: ভালভ রূপান্তরকারী এবং ভালভ-মেশিন ড্রাইভের উচ্চ ব্যয়, কম পাওয়ার ফ্যাক্টর, একটি অ্যাসিঙ্ক্রোনাস মোটরের তুলনায় কম দক্ষতার কারণে ড্রাইভ রটার উইন্ডিং মোটরের শর্ট সার্কিট ছাড়াই সর্বাধিক গতিতে কাজ করে, ইন্ডাকশন মোটরের কম ওভারলোড ক্ষমতা, ড্রাইভ মোটরের কম ব্যবহার (প্রায় 5-7%), বিশেষ স্টার্টিংয়ের প্রয়োজন মানে অগভীর গতি নিয়ন্ত্রণের সাথে শুরু করার বৈশিষ্ট্যগুলি সরবরাহ করে .