সময়ের ফাংশন হিসাবে স্বয়ংক্রিয় নিয়ন্ত্রণ সার্কিটের নোড
 ইলেক্ট্রোম্যাগনেটিক, ইলেকট্রনিক, মোটর এবং ইলেক্ট্রোপনিউমেটিক অটোমেশন সার্কিটগুলিতে ব্যাপকভাবে ব্যবহৃত হয়। সময় রিলে... সবচেয়ে সাধারণ সংকেত সময়কাল রূপান্তর স্কিম ডুমুর দেখানো হয়. 1. চিত্র চিত্র। 1, এবং চাপের সময়কাল নির্বিশেষে একটি নির্দিষ্ট সময়ের একটি পালস প্রদান করে বোতাম এসবি বোতাম SB টিপানোর পরে, রিলে কে সক্রিয় হয়, যা প্রক্রিয়াটি চালু করার জন্য একটি প্ররোচনা দেয়। নাড়ির সময়কাল কেটি রিলে এর সময় বিলম্ব দ্বারা নির্ধারিত হয়। SB বোতামটি একটি KQ কমান্ড রিলে দিয়ে প্রতিস্থাপন করা যেতে পারে।
ইলেক্ট্রোম্যাগনেটিক, ইলেকট্রনিক, মোটর এবং ইলেক্ট্রোপনিউমেটিক অটোমেশন সার্কিটগুলিতে ব্যাপকভাবে ব্যবহৃত হয়। সময় রিলে... সবচেয়ে সাধারণ সংকেত সময়কাল রূপান্তর স্কিম ডুমুর দেখানো হয়. 1. চিত্র চিত্র। 1, এবং চাপের সময়কাল নির্বিশেষে একটি নির্দিষ্ট সময়ের একটি পালস প্রদান করে বোতাম এসবি বোতাম SB টিপানোর পরে, রিলে কে সক্রিয় হয়, যা প্রক্রিয়াটি চালু করার জন্য একটি প্ররোচনা দেয়। নাড়ির সময়কাল কেটি রিলে এর সময় বিলম্ব দ্বারা নির্ধারিত হয়। SB বোতামটি একটি KQ কমান্ড রিলে দিয়ে প্রতিস্থাপন করা যেতে পারে।
চিত্র চিত্র। 8, b (ইলেক্ট্রোম্যাগনেটিক টাইম রিলে সহ) এবং ডুমুর। 1, c (ইলেক্ট্রোপনিউমেটিক বা মোটরচালিত সময় রিলে সহ) ট্র্যাভেল সুইচ SQ এর ক্রিয়া শুরু হওয়ার পরে একটি স্বল্প-মেয়াদী পালস সরবরাহ করতে ব্যবহৃত হয়। এই এবং পরবর্তী স্কিমগুলিতে, পরিচিতির পরিবর্তে মোশন সুইচ KQ রিলে পরিচিতি ব্যবহার করা যেতে পারে.
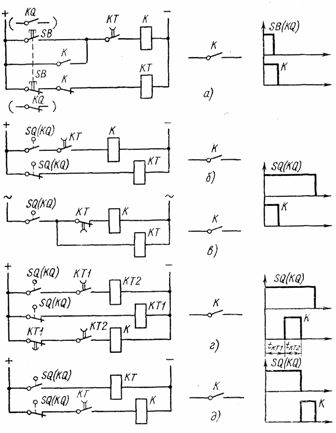
ভাত। 1. সংকেতের সময়কাল রূপান্তর করার জন্য সার্কিট
স্কিম ডুমুর।1d সুইচ SQ এর ক্রিয়া শুরু হওয়ার পরে একটি সময় বিলম্ব tKT1 সহ tKT2 সময়কালের একটি পালস প্রদান করে।
সার্কিট নোড চিত্র. 1, ই. এই পালস প্রয়োগ করার আগে যদি একটি সময় বিলম্ব tKT1 প্রয়োজন হয়, ডুমুরে সার্কিট। 1, e. নাড়ির সময়কাল tKT2।
অবস্থানগত নিয়ন্ত্রণ সার্কিটে, চিত্রের সার্কিট। 1g, যা ট্রিপ সুইচ SQ-এ প্রভাব শেষ হওয়ার পরে একটি দীর্ঘ কমান্ড জারি করার কাজ করে। SQ স্যুইচে একটি নতুন কর্মের শুরুতে কমান্ডটি বাতিল করা হয়।
একটি প্রচলিত উপায়ে চালু এবং বন্ধ করে অল্প সময়ের বিলম্ব (1.5 সেকেন্ড পর্যন্ত) পাওয়া যেতে পারে মধ্যবর্তী রিলে ক্যাপাসিটর বা ডায়োডের সাথে তাদের কয়েলগুলি বন্ধ করার কারণে।
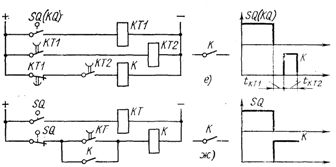
ডুমুরের চিত্রে। 2, এবং যোগাযোগ KQ বন্ধ হলে, রিলে K ক্যাপাসিটরের চার্জিং সময় দ্বারা নির্ধারিত সময়ের বিলম্বের সাথে সক্রিয় হয়। KQ বন্ধ হলে, রিলে K ক্যাপাসিটরের স্রাবের কারণে বিলম্বের সাথে ফিরে আসে।

ভাত। 2. ক্যাপাসিটর বা ডায়োডের সাথে মধ্যবর্তী রিলেগুলির কয়েলগুলিকে বন্ধ করে সময় বিলম্ব পাওয়া
রিলে চালু থাকলেই সময় বিলম্ব পেতে, চিত্রে সার্কিটটি ব্যবহার করুন। 2, খ. রিলে বন্ধ করার সময় বিলম্ব কার্যত অনুপস্থিত, যেহেতু ক্যাপাসিটরটি দ্রুত রোধকারী R-এ ডিসচার্জ করে (রিলে কয়েল K-এর প্রতিরোধের তুলনায় রোধ R-এর প্রতিরোধ উল্লেখযোগ্যভাবে কম)। একটি অনুরূপ সমস্যা ডুমুর মধ্যে সার্কিট দ্বারা সমাধান করা হয়. 2c, যা KQ রিলে এর একটি খোলার পরিচিতি ব্যবহার করে। এই সার্কিটের অসুবিধা হল একটি সংকেতের অনুপস্থিতিতে প্রতিরোধকের মাধ্যমে শক্তির উল্লেখযোগ্য ক্ষতি।
ডুমুর মধ্যে স্কিম. 2d, যেখানে KQ খোলে, রিলে K বন্ধ হয়ে যায় প্রতিরোধক R দ্বারা নিয়ন্ত্রিত সময় বিলম্বের সাথে।
ডুমুর মধ্যে চিত্র অনুযায়ী. 2, e কমান্ড রিলে KQ এর যোগাযোগ বন্ধ হওয়ার পরে K বন্ধ হলে একটি সময় বিলম্ব তৈরি হয়।
কমান্ড রিলে KQ সক্রিয় করার সময় রিলে K এর রিটার্নে সামান্য বিলম্বের প্রয়োজন হলে, চিত্রে চিত্রটি। 2, e, যেখানে রিলে K-এর কয়েল একটি ডায়োড দ্বারা শান্ট করা হয়।
একটি নির্দিষ্ট সময়কাল এবং শুল্ক চক্রের ডাল তৈরির স্কিমটি চিত্রে দেখানো হয়েছে। 3, ক. নাড়ির সময়কাল KT2 রিলে এর সময় বিলম্ব দ্বারা নির্ধারিত হয়, বিরতি KT1 রিলে এর বিলম্ব সময় দ্বারা নির্ধারিত হয়।
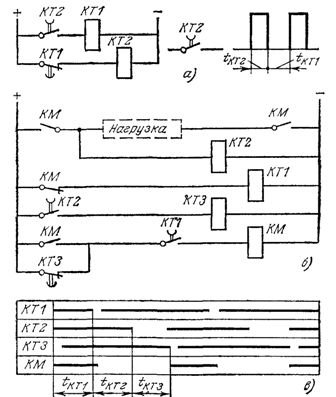
ভাত। 3. ডাল তৈরির জন্য রিলে সার্কিট
ডুমুরে। 3, b, একটি বর্ধিত বিরতি সময় সহ প্রক্রিয়াটির পর্যায়ক্রমিক স্যুইচিংয়ের একটি চিত্র দেওয়া হয়েছে। কন্টাক্টর KM-এর সুইচ-অন সময় রিলে KT1-এর সময় বিলম্বের সমান, বিরতির সময়কাল হল সমষ্টি রিলে KT2 এবং KTZ এর বিলম্বের। টাইমিং ডায়াগ্রামটি চিত্রে দেখানো হয়েছে। 3, গ.
সময় রিলে পালস জেনারেটর এর স্কিম্যাটিক্স বা যৌক্তিক উপাদান (নীচে দেখুন) লিনিয়ার মেকানিজমের অপারেশনের গতি নিয়ন্ত্রণ করতেও ব্যবহৃত হয়। তাপমাত্রা নিয়ন্ত্রকটিও ব্যাপক হয়ে উঠেছে, যেখানে একটি KEP-12U কমান্ড ডিভাইস রয়েছে, যা অনেক উপায়ে ইঞ্জিন টাইমিং রিলে এর মতো। ইউনিটটিতে একটি এক্সিকিউটিভ মোটর, পরিবর্তনশীল গিয়ার, ক্যাম ড্রাম, সুইচ এবং 12টি পরিচিতি রয়েছে।
গতি নিয়ন্ত্রকরা সাধারণত KEP-12U ডিভাইসের চক্রাকার অপারেশনের জন্য স্কিমটি ব্যবহার করে (চিত্র 4, ক)। সার্কিটটি রিলে K1 এবং K2 এবং কমান্ড ডিভাইস KT.1 এবং KT.2 এর পরিচিতিগুলি ব্যবহার করে তৈরি করা হয়েছে, যার সার্কিট চিত্রটি চিত্রে দেখানো হয়েছে। 4, খ.
কাজ শুরু করার আগে, এস সুইচটি চালু করুন।যখন KQ রিলে যোগাযোগ সংক্ষিপ্তভাবে বন্ধ করা হয়, ডিউটি চক্র শুরু করার জন্য একটি আদেশ প্রদান করে, K1 রিলে সক্রিয় এবং স্ব-ল্যাচিং হয়। রিলে K2 কমান্ড ডিভাইস KT চালু করে সক্রিয় করা হয়। মোটর উইন্ডিং LM1 এবং LM2 শক্তিপ্রাপ্ত হয় এবং ক্যামের ড্রাম ঘূর্ণন শুরু করে। ডিভাইস KT.3, KT.4, ইত্যাদির আউটপুট পরিচিতিগুলি, ক্রমানুসারে, নির্দিষ্ট সময়ে বন্ধ হয়ে যায় (চিত্র 4, b-তে চিত্রটি দেখুন) লিনিয়ার মেকানিজম চালু করার জন্য কমান্ড দেয়। চক্রের মাঝখানে, KT.1 এর সাথে যোগাযোগ করুন এবং রিলে K1 বন্ধ হয়ে যায়।
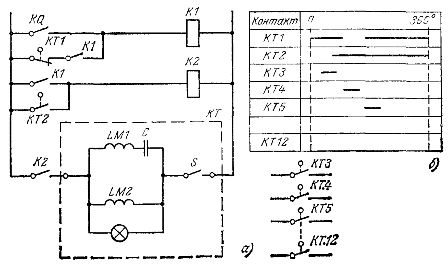
চিত্র 4. KEP-12U ডিভাইসের সাথে লাইনের গতি নিয়ামক
রিলে কয়েল K2 ডিভাইস KT.2 এর যোগাযোগের মাধ্যমে পাওয়ার সাপ্লাই সমর্থন করে। 360 ° কোণের মাধ্যমে ড্রামটি ঘোরানোর পরে, KT.2 যোগাযোগ খোলে, KEP-12U ডিভাইসের মোটর বন্ধ হয়ে যায়। চেইন পরবর্তী চক্রের জন্য প্রস্তুত।
উপসংহারে, আমরা ইলেক্ট্রোম্যাগনেটিক টাইম রিলে বিলম্বের রিমোট কন্ট্রোলের জন্য দুটি স্কিম বিবেচনা করব।
কন্ট্রোল প্যানেল থেকে বিলম্ব পরিবর্তন করতে, আপনি ট্রিগার কয়েল KT.1 এবং রিটার্ন কয়েল KT সহ একটি দুই-কয়েল রিলে সার্কিট ব্যবহার করতে পারেন। 2 (ডিম্যাগনেটাইজেশন), যার এমডিএস বিপরীতভাবে নির্দেশিত (চিত্র 5, ক)। রিলিজ কয়েলের MDS RP potentiometer ব্যবহার করে সমন্বয় করা হয়। ম্যাগনেটাইজেশন রিভার্সাল রিটার্ন এবং ট্রিপ করার পরে সিটির বারবার অপারেশন এড়াতে, ট্রিপিং কয়েলের এমডিএস অবশ্যই আর্মেচার টানতে যথেষ্ট এমডিএসের চেয়ে কম হতে হবে, অথবা সার্কিট কয়েলে তার নিজস্ব রিলে ক্লোজিং পরিচিতি চালু করতে হবে (চিত্র। 5, ক)।
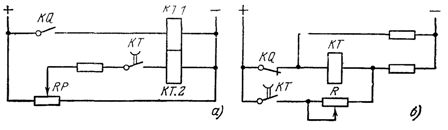
চিত্র 5. সময় রিলে বিলম্বের দূরবর্তী সমন্বয়ের জন্য স্কিম্যাটিক্স
ডুমুর মধ্যে চিত্র অনুযায়ী.5, b একটি একক কুণ্ডলী রিলে সময় বিলম্ব একটি দূরবর্তী পরিবর্তন করুন. যখন পরিচিতি KQ খোলে, তখন রিলে কয়েল KT একটি ডিগাউসিং কারেন্টের সাথে প্রবাহিত হয় যা রেজিস্টর R দ্বারা নিয়ন্ত্রিত হয়। ডিগাউসিং কারেন্ট বাড়লে রিলে বিলম্ব হ্রাস পায় এবং এর বিপরীতে। 220 V এর সরবরাহ ভোল্টেজের সাথে, 110 V এর নামমাত্র ভোল্টেজের জন্য একটি কয়েল সহ একটি রিলে ব্যবহার করা হয়।