পেষণকারী সংযোগ চিত্র
 বিভিন্ন ডিজাইনের ক্রাশারগুলি পশুখাদ্যের দানা এবং রুফেজ গুঁড়ো করতে ব্যবহৃত হয়। ডিবি টাইপ সিভিলেস চালনী নিয়ন্ত্রণের কাজের নীতি এবং সার্কিট ডায়াগ্রাম চিত্র 1 এ দেখানো হয়েছে।
বিভিন্ন ডিজাইনের ক্রাশারগুলি পশুখাদ্যের দানা এবং রুফেজ গুঁড়ো করতে ব্যবহৃত হয়। ডিবি টাইপ সিভিলেস চালনী নিয়ন্ত্রণের কাজের নীতি এবং সার্কিট ডায়াগ্রাম চিত্র 1 এ দেখানো হয়েছে।
অগার 8 (চিত্র 1) ব্যবহার করে শস্য পিষে হপার 9-এ লোড করা হয়, যার স্তরটি দুটি সেন্সর থেকে পাওয়া তথ্যের ভিত্তিতে স্বয়ংক্রিয়ভাবে বজায় থাকে। নাকাল জন্য শস্য সরবরাহ একটি ড্যাম্পার 10 দ্বারা নিয়ন্ত্রিত হয়. এই ক্ষেত্রে, নিষ্পেষণ পণ্য ফিল্টার 6 সরবরাহ লাইন মাধ্যমে বায়ু প্রবাহ দ্বারা পরিবাহিত হয়.
পর্যাপ্ত পরিমাণে চূর্ণ করা শস্য যা স্ক্রীন বিভাজক 4 এর মধ্য দিয়ে গেছে একটি সমাপ্ত পণ্য, যা auger 2 থেকে নিষ্কাশন করা হয়। বাকিগুলি ক্রাশিং চেম্বারে ফেরত দেওয়া হয় এবং এই পণ্যের পরিমাণ নিয়ন্ত্রণকারী ভালভ 5 ব্যবহার করে অপারেটর দ্বারা সেট করা হয় ( চরম ডান অবস্থানে, সমস্ত উপাদান ভগ্নাংশ ছাড়াই স্রাব হয়)। ধুলোবালি বাতাসের এক অংশ শেডিং চেম্বারে ফিরে আসে, এবং অন্য অংশ, ফিল্টার 6 এর মধ্য দিয়ে যায়, বায়ুমণ্ডলে ছেড়ে দেওয়া হয়।
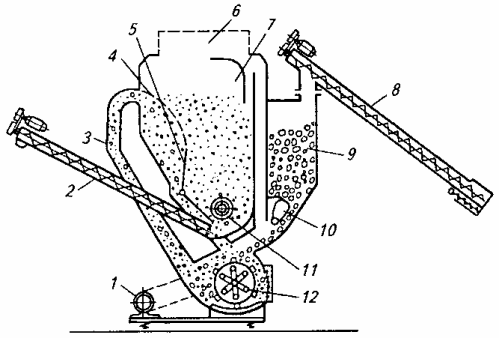
ভাত। 1.DB-5 ক্রাশারের কার্যকরী চিত্র: 1 — ইঞ্জিন, 2, 8 — augers, 3 — বায়ু নালী, 4 — বিভাজক, 5, 10 — শক শোষক, 6 — ফিল্টার, 7 — চেম্বার, 9 — গ্রেইন হপার, 11 — আন্দোলনকারী, 12 — রটার
পেষণকারীর কন্ট্রোল সার্কিট (চিত্র 2) আনলোডিং অগার মোটর (M1) এবং তারপরে ক্রাশার (M2) এর ক্রমিক সূচনা প্রদান করে এবং প্রারম্ভিক কারেন্ট কমাতে, ক্রাশার মোটর একটি «স্টার» সার্কিটে সংযুক্ত থাকে এবং তারপর একটি "ডেল্টা" সার্কিটে সুইচ করা হয়েছে। একটি খালি ক্রাশার হপার দিয়ে SB6 বোতাম টিপে ফিলিং আগার শুরু হয়।
ঝিল্লি সেন্সরের SL1 পরিচিতিগুলি হপারের শস্যের উপরের স্তরে বন্ধ না হওয়া পর্যন্ত auger কাজ করে। ম্যাগনেটিক স্টার্টার KM4 এবং রিলে KV যখন যোগাযোগ SL1 দ্বারা বাইপাস হয় তখন ডি-এনার্জাইজ করা হয়। হপার খালি করার পরে এবং উচ্চ স্তরের SL1 এবং নিম্ন SL2 এর সেন্সরগুলির পরিচিতিগুলি খোলার পরেও auger স্বয়ংক্রিয়ভাবে পুনরায় চালু হয়।
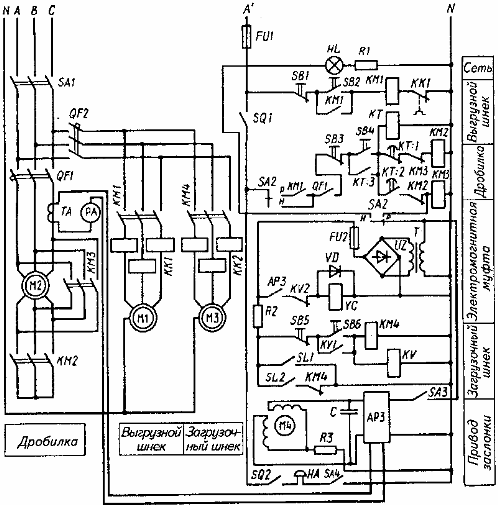
ভাত। 2. পেষণকারী বৈদ্যুতিক চিত্র
পেষণকারীর ক্ষমতা স্বয়ংক্রিয়ভাবে স্বয়ংক্রিয়ভাবে লোড রেগুলেটর (ARZ) এর অধীনে M4 অ্যাকচুয়েটর দ্বারা সরানো একটি নিয়ন্ত্রক ভালভের মাধ্যমে নিয়ন্ত্রিত হয়।
মোটরের একটি উল্লেখযোগ্য ওভারলোড এবং বিদ্যুৎ সরবরাহে বাধার ক্ষেত্রে, ইলেক্ট্রোম্যাগনেটিক ক্লাচ ওয়াইসি, যা শক শোষককে IM-এর সাথে সংযুক্ত করে, যোগাযোগ ARZ থেকে সংযোগ বিচ্ছিন্ন হয়ে যায়, শক শোষক তার নিজস্ব ওজনের অধীনে পড়ে এবং এর সরবরাহ পেষণকারী চেম্বারে শস্য স্টপ.
ড্যাম্পারের সম্পূর্ণ খোলা, ক্রাশার লোড হ্রাসের ইঙ্গিত দেয়, যখন সীমা সুইচ SQ2 বন্ধ থাকে তখন HA হর্ন দ্বারা সংকেত হয়।
খড় এবং খড় কাটার জন্য চপার, ছুরি বা হাতুড়ি ব্যবহার করা হয়।চূর্ণ করা কাঁচামাল ফিড হপারে খাওয়ানো হয়, যা এটি ঘোরানোর সাথে সাথে এটিকে ক্রাশিং চেম্বারের রটারের হাতুড়ির নীচে ফেলে দেয়। ঘূর্ণমান হাতুড়ি দ্বারা উত্পন্ন বায়ু প্রবাহ দ্বারা চূর্ণ ভর চেম্বার থেকে বাহিত হয়।
কন্ট্রোল সার্কিট ক্রাশার ইঞ্জিন এবং তারপর (20 সেকেন্ডের পরে) হপারের ক্রমিক সূচনা নিশ্চিত করে। এই ক্ষেত্রে, ক্রাশারটি "স্টার" সার্কিট থেকে "ডেল্টা" সার্কিটে মোটর স্যুইচ করে শুরু করা হয়।
ক্রাশার মোটরের উপর একটি ওভারলোডের ক্ষেত্রে, ইলেক্ট্রোম্যাগনেটিক ক্লাচটি সংক্ষিপ্তভাবে বিচ্ছিন্ন হয়ে যায় এবং ক্রাশারের ফিড ব্যাহত হয়। পেষণকারীর উপর লোড কমানোর পরে, শক্তি পুনরায় চালু করা হয়। মোটর ওভারলোড 20 সেকেন্ডের বেশি স্থায়ী হলে, হপার ড্রাইভ মোটরটি বন্ধ হয়ে যায়।