একটি টাইমিং ডায়াগ্রাম এবং মেকানিজমের অপারেশনের একটি ব্লক ডায়াগ্রাম আঁকার একটি উদাহরণ
প্রযুক্তিগত লাইনের নিয়ন্ত্রণ স্কিমগুলিতে, আউটপুট উপাদানগুলির অবস্থা, যেমন অ্যাকচুয়েটর (ইলেক্ট্রোম্যাগনেটিক রিলে, ম্যাগনেটিক স্টার্টার, সলিড-স্টেট রিলে, ইত্যাদি), শুধুমাত্র ইনপুট বা রিসিভিং উপাদানের (বোতাম, সেন্সর, ইত্যাদি) সংমিশ্রণ দ্বারা নয়, সময়ের সাথে তাদের পরিবর্তনের ক্রম দ্বারাও নির্ধারিত হয়।
পরিকল্পিত প্রযুক্তিগত প্রক্রিয়ার একটি মৌখিক বিবরণ ইনপুট এবং আউটপুট সংকেতের পরিবর্তনের সময়সূচী আকারে উপস্থাপন করা যেতে পারে, যাকে প্রযুক্তিগত প্রক্রিয়ার একটি সময় চিত্র বলা হয়।

একটি টাইমিং ডায়াগ্রাম তৈরির একটি উদাহরণ একটি শস্য প্রাক-পরিষ্কার লাইন ডায়াগ্রামের উপর ভিত্তি করে তৈরি করা হবে।
সার্কিট অপারেশনের বর্ণনা
SA1 সুইচ ব্যবহার করে, অপারেটিং মোডটি নির্বাচন করা হয়েছে: স্বয়ংক্রিয় — প্রধান অপারেটিং মোড, ম্যানুয়াল — কমিশনিং মোড৷
কমিশনিং মোডের মধ্যে রয়েছে SB4-SB6 লকিং বোতামগুলির মাধ্যমে লিনিয়ার মেকানিজমের চৌম্বকীয় স্টার্টারের কয়েলগুলিতে শক্তি সরবরাহ করা, সমস্ত নিয়ন্ত্রণ যুক্তিকে বাইপাস করে। এই মোডে, অপারেটর নিজেই লাইনের দৈর্ঘ্য বা কিছু পৃথক প্রক্রিয়া সম্পর্কে সিদ্ধান্ত নেয়, হপার ভরাটের নিয়ন্ত্রণ কেবল দৃশ্যতই সঞ্চালিত হয়।
একটি নিয়ম হিসাবে, অপারেশনের এই মোডটি অপারেশনের জরুরী মোডগুলিতে ব্যবহৃত হয়, যখন নিয়ন্ত্রণের যুক্তি ভেঙে যায় এবং লাইনে পণ্যটি না হারিয়ে প্রযুক্তিগত প্রক্রিয়াটি সম্পূর্ণ করা প্রয়োজন, বা কমিশনিংয়ের সময়, যখন কিছু প্রক্রিয়া মেরামত করার পরে। লাইনে, শুধুমাত্র এটি শুরু করা প্রয়োজন, সমস্ত রৈখিক প্রক্রিয়া নয়।
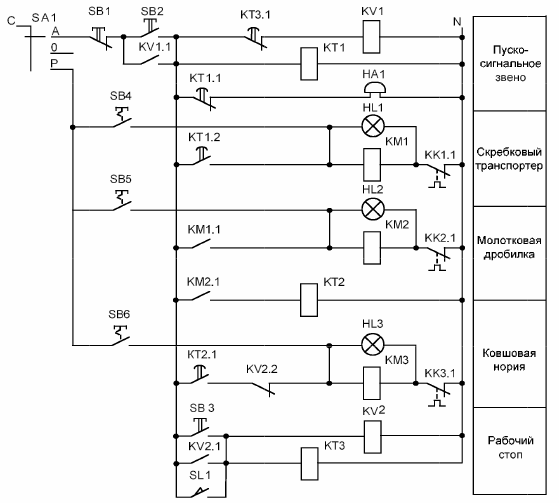
ভাত। 1. শস্য প্রাক-পরিষ্কার লাইনের রিলে-যোগাযোগ নিয়ন্ত্রণ সার্কিট
অপারেটিং মোড সুইচের পরে, কন্ট্রোল সার্কিটে একটি স্টার্ট-আপ সিগন্যালিং ব্লক অন্তর্ভুক্ত করা হয়, যা একটি সময় বিলম্বের সাথে একই সাথে বেলটি বন্ধ করতে এবং স্ক্র্যাপার কনভেয়র চালু করতে দেয়। রিলে-কন্টাক্ট সার্কিট রচনা করার সময়, মেকানিজম চালু বা বন্ধ করার ক্রমটি ম্যাগনেটিক স্টার্টারের ক্লোজিং কন্টাক্টের মাধ্যমে সঞ্চালিত হয়।
সুতরাং আমাদের ক্ষেত্রে, যদি চৌম্বকীয় স্টার্টার KM1 (স্ক্র্যাপার কনভেয়র) এর কয়েলে শক্তি থাকে, যথাক্রমে, KM1.1 যোগাযোগের মাধ্যমে, শক্তিও চৌম্বকীয় স্টার্টার KM2 (হাতুড়ি) এর কয়েলে থাকবে।
একই সময়ে, লাইনের সমস্ত প্রক্রিয়া শুরু করা অবাস্তব, কারণ অপারেশন চলাকালীন এই ধরনের একটি অপারেশন মোড ঘটতে পারে যখন লাইনের দুটি প্রক্রিয়ার বৈদ্যুতিক ড্রাইভগুলি এখনও তাদের নামমাত্র অপারেশন মোডে পৌঁছেনি এবং পণ্যটি হেড মেকানিজমের মাধ্যমে তাদের কাছে পৌঁছে দেওয়া হয়, যার ফলে লাইনের জরুরি স্টপ হয়। অতএব, কন্ট্রোল সার্কিটে, হেড মেকানিজমের চৌম্বকীয় স্টার্টার KM3 এর কুণ্ডলীতে শক্তি সরবরাহ করা হয় সময় রিলে KT2 দ্বারা উপলব্ধি করার সময় বিলম্বের সাথে।
লিনিয়ার মেকানিজম নিযুক্ত আছে, কাজ চলছে। কখনও কখনও অপারেশন চলাকালীন এমন একটি সময় আসে যখন হপার এখনও পূর্ণ হয় না এবং লাইনটি বন্ধ করতে হবে। এই ক্ষেত্রে, একটি "ওয়ার্ক স্টপ" ব্লক কন্ট্রোল স্কিমে ব্যবহৃত হয়, যা সঠিক ক্রমানুসারে লাইনের সমস্ত প্রক্রিয়া বন্ধ করা সম্ভব করে (রেখা বরাবর পণ্যের চলাচলের দিকে)।
সুতরাং, যখন SB3 বোতাম টিপানো হয়, তখন মধ্যবর্তী রিলে KV2 চালু হয়, যার খোলার পরিচিতি KV2.2 কয়েল KM3 দিয়ে সার্কিট ভেঙে দেয়, লাইন হেড মেকানিজম বন্ধ হয়ে যায়। একই সময়ে, টাইম রিলে KT3 পণ্য থেকে প্রক্রিয়াগুলি পরিষ্কার করার জন্য লাইনের অপারেশন সময়ের উপর একটি প্রতিবেদন তৈরি করে।
একটি নির্দিষ্ট সময়ের পরে, সময়ের রিলে KT3.1 এর যোগাযোগ মধ্যবর্তী রিলে KV1 এর সাথে সার্কিটটি ভেঙে দেয়, যার পরিচিতি স্টার্ট বোতামটিকে বাইপাস করে। এর ফলে সম্পূর্ণ নিয়ন্ত্রণ সার্কিট বন্ধ হয়ে যায় এবং ফলস্বরূপ, রৈখিক প্রক্রিয়া বন্ধ হয়ে যায়। SL1 হপারে লেভেল সেন্সর ট্রিগার করার সময় কন্ট্রোল সার্কিটের অপারেশনের জন্য একটি অনুরূপ অ্যালগরিদম।
উপস্থাপিত কন্ট্রোল স্কিমে ওভারলোড থেকে রৈখিক বৈদ্যুতিক মোটরগুলির সুরক্ষা তাপীয় রিলে KK1.1 ... KK3.1 এর যোগাযোগগুলিকে বাধা দেওয়ার মাধ্যমে সঞ্চালিত হয়, যা চৌম্বকীয় স্টার্টার KM1 এর কয়েল সহ সার্কিটগুলিতে যথাক্রমে ইনস্টল করা হয় .. KM3।
কন্ট্রোল সার্কিটে রৈখিক প্রক্রিয়াগুলির ক্রিয়াকলাপের চাক্ষুষ নিয়ন্ত্রণের জন্য HL1 ... HL3 নির্দেশক ল্যাম্প রয়েছে। লিনিয়ার মেকানিজমের স্বাভাবিক ক্রিয়াকলাপে, সূচক বাতিগুলি জ্বলবে। জরুরী শাটডাউনের ক্ষেত্রে, চৌম্বকীয় স্টার্টারের সাথে সার্কিটের শক্তি অদৃশ্য হয়ে যায় এবং সেই অনুযায়ী নির্দেশক বাতিটি নিভে যায়।
বৈদ্যুতিক প্রধান স্বয়ংক্রিয় মোড অপারেশনের স্কিম অনুসারে, শস্য প্রাক-পরিষ্কার লাইনের জন্য 3 টি বোতাম প্রয়োজন: SB1 «স্টপ», SB2 «স্টার্ট» এবং SB3 «ওয়ার্ক স্টপ», সেইসাথে একটি লেভেল সেন্সর SL1। এইভাবে আমাদের 4টি ইনপুট উপাদান রয়েছে। এছাড়াও, বোতামগুলি স্ব-রিটার্ন সহ গৃহীত হয়, যেমন পাওয়ার-অন অবস্থা ঠিক না করেই।
একটি সময় চার্ট নির্মাণের একটি উদাহরণ
আউটপুট আইটেম 4: বেল HA1, স্ক্র্যাপার কনভেয়ার KM1, হাতুড়ি পেষণকারী KM2 এবং বালতি লিফট KM3।
যখন SB2 «স্টার্ট» বোতাম টিপুন, প্রথম ট্রিগার লিঙ্ক (বেল HA1) 10 সেকেন্ডের জন্য সক্রিয় করা উচিত যাতে কর্মীদের সতর্ক করা যায় যে প্রক্রিয়া লাইন শুরু হতে চলেছে।
HA1 এর ঘণ্টা বাজানোর পর, অর্থাৎ। "স্টার্ট" বোতাম SB2 86 টিপানোর 10 সেকেন্ড পরে, স্ক্র্যাপার কনভেয়ার KM1 এবং ইমপ্যাক্ট ক্রাশার KM2 চালু হয় (চিত্র 2 দেখুন)।
মেকানিজমগুলির কাজের সময় তাদের উত্পাদনশীলতা এবং উত্পাদনের পরিমাণের উপর ভিত্তি করে নির্ধারিত হয়। স্ক্র্যাপার কনভেয়ার, হাতুড়ি পেষণকারী এবং বালতি লিফটের উত্পাদনশীলতা যথাক্রমে 5 t/h, 3 t/h এবং 2 t/h হয়। শস্যের পরিমাণ নির্ধারণ করা হয় ফড়িং এর আয়তনের উপর ভিত্তি করে এবং প্রতি 1 মি 3 প্রতি এক কিলোগ্রাম শস্য।
বিভিন্ন শস্যের শস্যের আকৃতি, ঘনত্ব এবং সংশ্লিষ্ট ওজন আলাদা, তাই প্রতিটি ধরণের শস্যের একটি ঘনমিটার ওজন একই হতে পারে না।
আসুন বাঙ্কারের আয়তন 5 মিটার নেওয়া যাক। লোড করা শস্য হল বাকউইট, যার ওজন 560 - 660 কেজি। রিসাইকেল বিনের প্রাথমিক অবস্থা খালি। তারপর একটি পূর্ণ পাত্রে শস্যের পরিমাণ: N = 580 x 5 = 2900 কেজি।
বালতি লিফটের সমস্ত প্রক্রিয়ার সর্বনিম্ন উত্পাদনশীলতা রয়েছে; তিনি লাইনে শস্য সরবরাহ করেন। এর কাজের সময় হবে: Tm3 = 2000/2900 = 0.689 h = 41 মিনিট।
অবশিষ্ট প্রক্রিয়াগুলির কাজের সময় 41 মিনিটের বেশি হবে এবং সার্কিটের যুক্তির উপর ভিত্তি করে নির্ধারিত হয়।
স্ক্র্যাপার কনভেয়ার KM1 এবং ইমপ্যাক্ট ক্রাশার KM2 চালু করার পর, তাদের ত্বরান্বিত করার জন্য সময় দিতে হবে। সমস্ত প্রক্রিয়ার জন্য ত্বরণ সময় নেওয়া হয় - 10 সেকেন্ড। বালতি উত্তোলক KM3 শেষবার শুরু করা হয়েছে (KM1 এবং KM2 শুরু করার 10 সেকেন্ড পরে) যাতে হ্যামার ক্রাশার KM2 এবং স্ক্র্যাপার কনভেয়ার KM1-এ পণ্যের বাধা সৃষ্টি না হয়। 41 মিনিটের পরে, হপারটি পূরণ করার জন্য প্রয়োজনীয় সমস্ত পণ্য KM3 বালতি লিফটের মধ্য দিয়ে যাবে।
SL স্তরের সেন্সরটি এমনভাবে ইনস্টল করা হয়েছে যাতে পণ্যের অবশিষ্টাংশগুলি হ্যামার ক্রাশার KM2 এবং স্ক্র্যাপার কনভেয়র KM1 এর মধ্য দিয়ে যাওয়ার আগেই হপার ফিলিং সিগন্যাল প্রাপ্ত হয়।
যখন SL1 স্তরের সেন্সরটি কার্যকর হয়, তখন KM3 হেড মেকানিজম বন্ধ হয়ে যায় (41 মিনিট এবং 20 সেকেন্ড পরে SB2 «স্টার্ট» বোতাম টিপে)। একটি সময় বিলম্বের সাথে, KM1 এবং KM2 একই সাথে বন্ধ হয়ে যায়। এই সময় বিলম্ব 20 সেকেন্ডের সমান ধরে নেওয়া যেতে পারে।
স্বাভাবিক অপারেশনের জন্য টাইমিং ডায়াগ্রাম চিত্র 2 এ দেখানো হয়েছে।
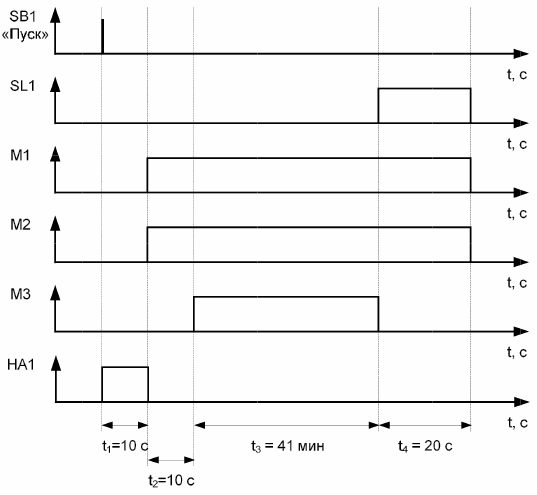
ভাত। 2. স্বাভাবিক অপারেশনের জন্য টাইমিং ডায়াগ্রাম
"অপারেশন স্টপ" মোডে, অপারেটর লেভেল সেন্সর SL1 ট্রিগার করার আগে প্রক্রিয়াটি বন্ধ করতে পারে, তাই এই ক্ষেত্রে প্রক্রিয়াগুলির অপারেশনের সময় নির্ধারণ করা অসম্ভব। "জেনারেল স্টপ" মোডে, সমস্ত প্রক্রিয়া অবিলম্বে নিষ্ক্রিয় করা হয়।
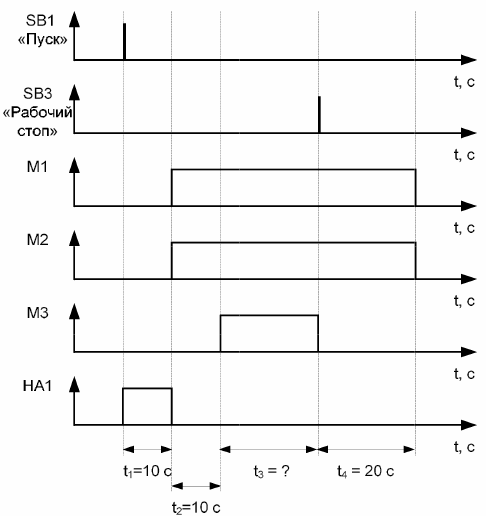
ভাত। 3. অপারেশনের "অপারেশন স্টপ" মোডের জন্য টাইমিং ডায়াগ্রাম
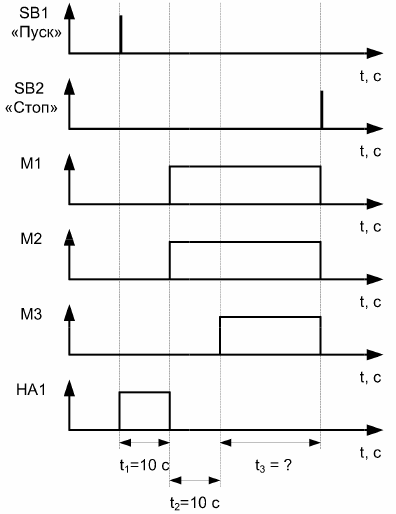
ভাত। 4. "টোটাল স্টপ" মোডের জন্য টাইমিং ডায়াগ্রাম
মেকানিজমের অপারেশনের একটি ব্লক ডায়াগ্রাম তৈরির উদাহরণ
প্রযুক্তিগত প্রক্রিয়ার ব্লক ডায়াগ্রামে অবশ্যই তার কাজের অ্যালগরিদম স্পষ্টভাবে দেখাতে হবে। এর জন্য, নির্দিষ্ট কর্মের বিশেষ উপাধি ব্যবহার করা হয়।
চিত্র 5 একটি শস্য প্রিক্লিনিং লাইনের জন্য একটি উদাহরণ ব্লক ডায়াগ্রাম দেখায়। উপস্থাপিত ব্লক ডায়াগ্রাম প্রযুক্তিগত প্রক্রিয়ার কার্যকারিতার জন্য সমস্ত সম্ভাব্য বিকল্প দেখায়। "শুরু" বোতাম SB2 টিপে শস্য প্রাক-পরিষ্কার লাইনের অপারেশন চলাকালীন যে কোনও সময় "দুর্ঘটনা" পরিস্থিতি ঘটতে পারে।
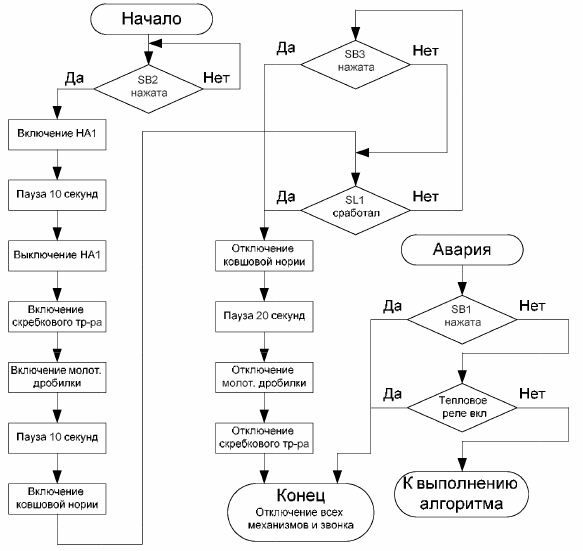
ভাত। 5. শস্য প্রাক-পরিষ্কার লাইনের ব্লক ডায়াগ্রাম