মেকানিজমের গতিবিধি পিস্টন নিয়ন্ত্রণ
রিলে সার্কিট
 ডুমুরে। 1 SQ কন্ট্রোলার দ্বারা নির্ধারিত ধ্রুবক স্ট্রোক পিস্টন মোশন কন্ট্রোল স্কিমের বিভিন্ন রূপ দেখায়।
ডুমুরে। 1 SQ কন্ট্রোলার দ্বারা নির্ধারিত ধ্রুবক স্ট্রোক পিস্টন মোশন কন্ট্রোল স্কিমের বিভিন্ন রূপ দেখায়।
চিত্রে চিত্রগুলি। 1, a-c ব্যবহার করা হয় যখন চক্রটিতে একটি "ফরোয়ার্ড" মুভমেন্ট B এবং একটি "পেছনগামী" মুভমেন্ট H থাকে শুরুর অবস্থানে। স্কিম 1, a এবং b কেকিউ রিলে দ্বারা প্রদত্ত একটি স্বয়ংক্রিয় কমান্ডের সাথে ব্যবহার করা হয়। KT রিলে বিপরীত শুরু করার আগে একটি বিরতি প্রদান করে। ডুমুরের চিত্রে। 1, সাইকেল স্টার্ট কমান্ড কন্ট্রোলার বা ইউনিভার্সাল সুইচ এসএম দ্বারা দেওয়া হয়।
অসীম পারস্পরিক গতি বাস্তবায়নের জন্য, চিত্রে চিত্রটি। 1, ঘ. যদি স্ট্রোকের সংখ্যা একটি প্রদত্ত মান n দ্বারা সীমিত করা আবশ্যক, একটি গণনা রিলে একটি খোলা পরিচিতি বা একাধিক রিলে একটি ইউনিট, যা "ব্যাক" কন্টাক্টর KM2 এর সমাপ্তি যোগাযোগ দ্বারা সরবরাহ করা ডাল গণনা করে, কন্টাক্টর সার্কিট "ফরোয়ার্ড" KM1 এর মধ্যে অন্তর্ভুক্ত।
চারটি অবস্থানে পরিবর্তনশীল স্ট্রোক দৈর্ঘ্য সহ একটি পারস্পরিক গতি বাস্তবায়নের একটি উদাহরণ চিত্রে দেখানো হয়েছে। 2.পরিচিতি SQ.1- SQ.4- কমান্ড ডিভাইস SQ-এর বিকল্পভাবে "ফরোয়ার্ড" স্ট্রোকের 1-4 অবস্থানে মেকানিজম বন্ধ করতে ব্যবহৃত হয়, প্রাথমিক অবস্থানে SQ.5- এর সাথে যোগাযোগ করুন। সার্কিটটি অটোমেশন রিলে KQ1 দ্বারা প্রদত্ত পালস কমান্ড ব্যবহার করে, যা বন্ধ থাকে, উদাহরণস্বরূপ, ওয়ার্কপিস খাওয়ানোর সময়, এবং KQ2, যা প্রতিটি স্ট্রোকের শেষে মধ্যবর্তী অপারেশনের শেষকে ঠিক করে।
অনুক্রমিক চালচলন SQ.1 — SQ.3 SQ কন্ট্রোলারের "ব্যাক" মেকানিজম KS1, KSZ এবং KS5 এর চালগুলির সংখ্যা গণনার জন্য রিলে পরিচিতি দ্বারা সঞ্চালিত হয়। রিলে KS7, চতুর্থ চাল "পিছনে" ঠিক করে, রিলে KS1-KC6 বন্ধ করে এবং এই গ্রুপের ফাঁকা (রিলে KR) সঙ্গে প্রযুক্তিগত অপারেশনের শেষে নীল না আসা পর্যন্ত "ফরোয়ার্ড" চালু করতে পরবর্তী সুইচিং নিষিদ্ধ করে। KC7 কুণ্ডলী সার্কিটে KR রিলে খোলার পরিচিতি সার্কিটটিকে তার আসল অবস্থায় ফিরিয়ে দেয়।
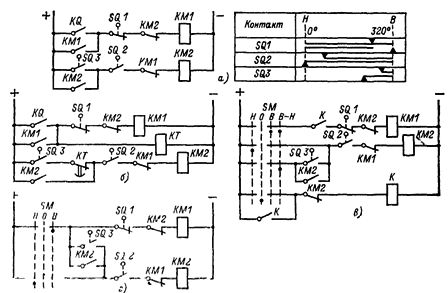
ভাত। 1. আদান-প্রদান আন্দোলনের জন্য রিলে কন্ট্রোল সার্কিট
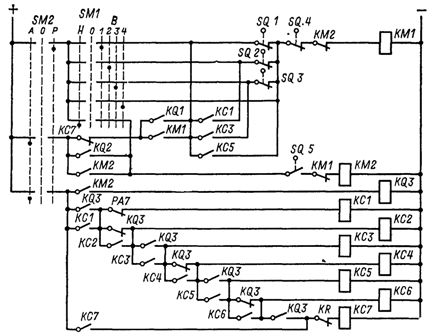
চিত্র 2. পরিবর্তনশীল স্ট্রোক দৈর্ঘ্যের সাথে রেসিপ্রোকেটিং রিলে নিয়ন্ত্রণ স্কিম
লজিক সার্কিট
"লজিক টি" সিরিজের উপাদানগুলিতে তৈরি পিস্টন মুভমেন্ট কন্ট্রোল সার্কিটটি চিত্রে দেখানো হয়েছে। 3. T-201 টাইপের উপাদান D1-D3 লজিক উপাদানের সাথে ইনপুট রিলে সংকেত সমন্বয় করতে ব্যবহৃত হয়।
D4.1, D4.2 উপাদানগুলির মেমরি স্পন্দিত রিলে KQ স্যুইচ করার সময় "অগ্রসর" করার জন্য একটি কমান্ডের উপস্থিতি ঠিক করে। পরিবর্ধক D5 এর মাধ্যমে, সামনের কন্টাক্টর KM1 চালু করা হয়েছে। "ফরোয়ার্ড" মেকানিজমের গতিবিধির শেষে, যখন কন্ট্রোলার SQ 1 এর যোগাযোগ বন্ধ থাকে, তখন সংশ্লিষ্ট উপাদান D2 এর আউটপুটে একটি সংকেত 1 উপস্থিত হয়, যা মেমরি D4 এবং কন্টাক্টর KM1 বন্ধ করে এবং চালু করে। D6 উপাদানের মেমরি। এই ক্ষেত্রে, "পিছনে" সরানোর নির্দেশ দেওয়া হয় এবং মনে রাখা হয়।এই কমান্ডটি সরানো হয় এবং নিয়ামক SQ 2 এর পরিচিতি প্রাথমিক অবস্থানে বন্ধ হয়ে গেলে, যখন সংকেত 1 সংশ্লিষ্ট উপাদান D3 এর আউটপুটে উপস্থিত হয়, তখন মেমরি D6 অক্ষম করা হয়।
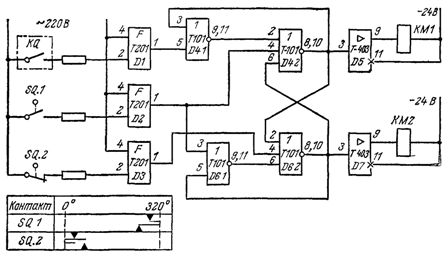
ভাত। 3. "লজিক টি" সিরিজের উপাদানগুলিতে পারস্পরিক গতিবিধি নিয়ন্ত্রণের পরিকল্পনা
মেমরি D4 এবং D6 ব্লক করা আছে, তাই তাদের মধ্যে শুধুমাত্র একটি চালু করা যেতে পারে। যখন মেমরি D4 চালু থাকে, তখন D4.2 উপাদানের আউটপুট থেকে সংকেত 1 উপাদান D6.2 এর ইনপুট 2-এ দেওয়া হয়, মেমরি D6 নিষ্ক্রিয় করে এবং এর বিপরীতে। মেমরি D6 চালু হলে, D6 2 উপাদানের আউটপুট থেকে সংকেত 1 উপাদান D4.2 এর ইনপুট 6 এ দেওয়া হয়, মেমরি D4 নিষ্ক্রিয় করে।