একাধিক অবস্থান থেকে বৈদ্যুতিক ড্রাইভ নিয়ন্ত্রণ স্কিম
 ক্রমাগত প্রক্রিয়া লাইনের জন্য, যেখানে ড্রাইভগুলি প্রধানত এক দিকে কাজ করে (ফরোয়ার্ড) এবং বিপরীতমুখী বিরল, এটি ব্রেকারের মাধ্যমে "ফরোয়ার্ড" অপারেশনের জন্য একটি লাইন কন্টাক্টর অন্তর্ভুক্ত করার সাথে সার্কিট (চিত্র 1) ব্যবহার করার পরামর্শ দেওয়া হয়, এবং "বিপরীত" অপারেশনের জন্য — কেএমআর কন্টাক্টরের পরিচিতিগুলিকে সক্রিয় করার মাধ্যমে। এই ব্যবস্থা পছন্দের দিকে ড্রাইভ শুরু করার সময় কমিয়ে দেয়।
ক্রমাগত প্রক্রিয়া লাইনের জন্য, যেখানে ড্রাইভগুলি প্রধানত এক দিকে কাজ করে (ফরোয়ার্ড) এবং বিপরীতমুখী বিরল, এটি ব্রেকারের মাধ্যমে "ফরোয়ার্ড" অপারেশনের জন্য একটি লাইন কন্টাক্টর অন্তর্ভুক্ত করার সাথে সার্কিট (চিত্র 1) ব্যবহার করার পরামর্শ দেওয়া হয়, এবং "বিপরীত" অপারেশনের জন্য — কেএমআর কন্টাক্টরের পরিচিতিগুলিকে সক্রিয় করার মাধ্যমে। এই ব্যবস্থা পছন্দের দিকে ড্রাইভ শুরু করার সময় কমিয়ে দেয়।
চিত্রে চিত্রটি। 2 একটি চলমান বস্তু থেকে বৈদ্যুতিক মোটরের দূরবর্তী বিপরীত নিয়ন্ত্রণের অনুমতি দেয়। এই সার্কিটটি ব্যবহার করা হয়, উদাহরণস্বরূপ, ক্রেন থেকে উত্তাপের ওয়েল কভারের মোটর নিয়ন্ত্রণ করতে। সিগন্যাল সার্কিট এবং বিভিন্ন সিগন্যালের অভ্যর্থনা চিত্রে দেখানো হয়েছে। 3 - 9।
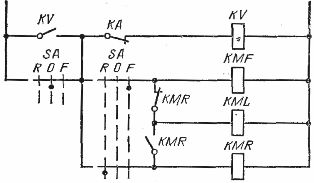
ভাত। 1. বিরল পিছন «পিছন» সঙ্গে রিয়ার ইঞ্জিন নিয়ন্ত্রণ স্কিম।
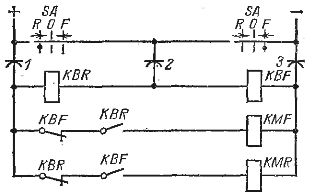
ভাত। 2. একটি কন্ট্রোল ট্রলের মাধ্যমে মোটরের বিপরীত নিয়ন্ত্রণের স্কিম।
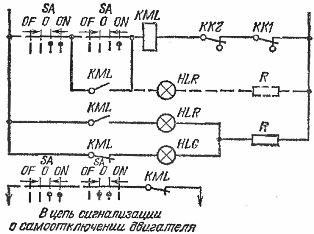
ভাত। 3. একটি অপরিবর্তনীয় বৈদ্যুতিক ড্রাইভের অবস্থা সংকেত করার জন্য পরিকল্পনা।
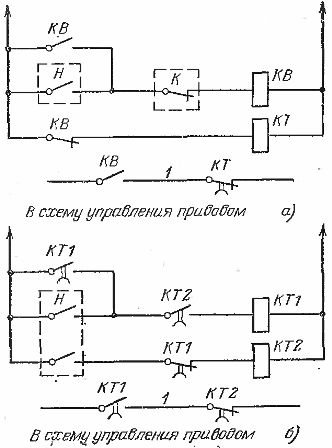
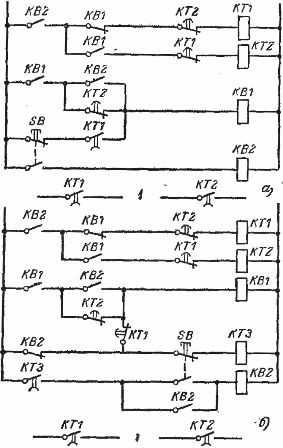
ভাত। 4.একটি দীর্ঘ (a) এবং স্পন্দিত (b) সংকেতের এক্সপোজার শুরু হওয়ার পরে একটি সময় বিলম্ব সহ একটি সংকেত গ্রহণের জন্য সার্কিট: K — ড্রাইভের কন্ট্রোল সার্কিটে যোগাযোগ আনলক করা, 1 — পরিচিতিগুলি৷
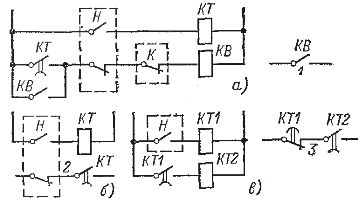
ভাত। 5. সংকেত H লং (a), পালস (b), একটি সময় বিলম্বের সাথে পালস (c) এর বীট (লেজ থেকে) শেষ হওয়ার পরে একটি সংকেত পাওয়ার স্কিম। K — ড্রাইভ কন্ট্রোল সার্কিটে পরিচিতি আনলক করা, 1, 2, 3 — পরিচিতি৷
ভাত। 6. মাধ্যমিক H এর শুরুর পরে একটি দীর্ঘ সংকেত পাওয়ার পরিকল্পনা।
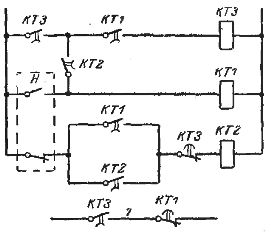
ভাত। 7. সংকেত এইচ (KT1 হল 0.2-0.8 s; KT2 0.3 s; KTZ 0.5 s) এর সেকেন্ডারি অ্যাকশনের পরে একটি সময় বিলম্বের সাথে একটি পালস সংকেত পাওয়ার পরিকল্পনা। 1 - ড্রাইভ কন্ট্রোল সার্কিটের পরিচিতি।
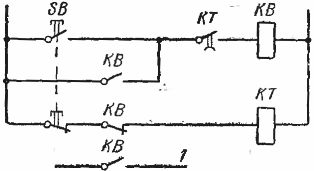
ভাত। 8. বোতাম টিপানোর সময়কাল নির্বিশেষে একটি নির্দিষ্ট সময়ের সংকেত পাওয়ার স্কিম: 1 — ড্রাইভ কন্ট্রোল সার্কিটের সাথে যোগাযোগ করুন।
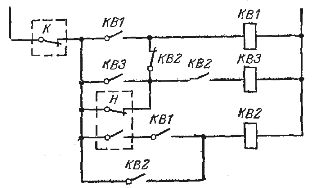
একটি নির্দিষ্ট সংখ্যক অপারেশন বা চক্র গণনা করার পরে ড্রাইভকে স্বয়ংক্রিয়ভাবে প্রভাবিত করতে কাউন্টিং স্কিম ব্যবহার করা হয়। তারা বন্ধ এবং খোলার (চিত্র 10), শুধুমাত্র বন্ধ (চিত্র 11), অথবা শুধুমাত্র খোলার (চিত্র 12) গণনা করতে পারে।
নির্দেশিত স্কিম অনুযায়ী ডাল গণনা ফটো রিলে পরিচিতি, গতি সুইচ বা অন্যান্য ডিভাইস থেকে সরবরাহ করা হয়।
ডুমুর দেখানো গণনা প্রকল্পে. 10, REV850 রিলেটি আর্মেচারের একটি চৌম্বকীয় "স্টিকিং" এর সাথে ব্যবহার করা হয়, এবং তাই এই সার্কিটে ভোল্টেজ সরবরাহের বাধা গণনাকে বিরক্ত করে না। অন্যান্য গণনা সার্কিটে, যখন ভোল্টেজ সরবরাহ ব্যাহত হয়, তখন পালস গণনা হ্রাস পায়।
অ্যাকাউন্ট স্কিমের বৈধতা পরীক্ষা করতে (চিত্র 11), নিয়ন্ত্রণ বোতাম… প্রতিবার যখন আপনি SB0N বোতাম টিপুন, সার্কিট একটি গণনা করে। SB0F বোতামটি কাউন্টারটি পুনরায় সেট করতে ব্যবহৃত হয়।এই ধরনের বোতামগুলি অন্যান্য স্কিমেও প্রদান করা যেতে পারে।
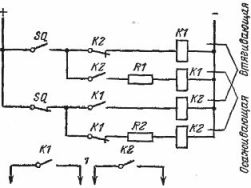
ভাত। 9. পরপর একটি বোতাম টিপে দুটি ভিন্ন সার্কিটে সিগন্যাল গ্রহণের জন্য সার্কিট: a — সিগন্যালের সময়কাল বোতাম টিপানোর সময়কালের সমান, b — সিগন্যালের সময়কাল বোতাম টিপানোর সময়কালের উপর নির্ভর করে না , 1 — ড্রাইভ কন্ট্রোল সার্কিটের পরিচিতি।
ভাত। 10. দুই পর্যন্ত অ্যাকাউন্টের স্কিম।
প্রতিটি সংখ্যার জন্য ডালগুলি হল সীমা সুইচ SQ-এর যোগাযোগের একটি বন্ধ এবং একটি খোলার; 1 - ড্রাইভ কন্ট্রোল সার্কিটের পরিচিতি।
ডুমুরের সার্কিট মধ্যে ডাল গণনা. 11, 12 হল SQ কন্টাক্টের স্বল্প-মেয়াদী বন্ধ (খোলা) এবং এই পরিচিতির বন্ধ অবস্থা ইমপালস কন্টাক্টর কেএনএ এবং একটি রিলে কেবি (কেএল) চালু করার জন্য যথেষ্ট হওয়া উচিত।
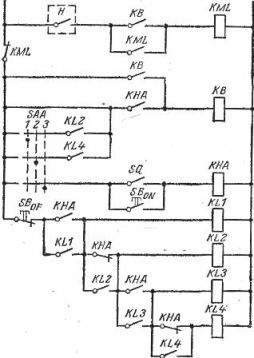
ভাত। 11. যোগাযোগ SQ বন্ধ হলে তিনটি গণনা করার স্কিম।
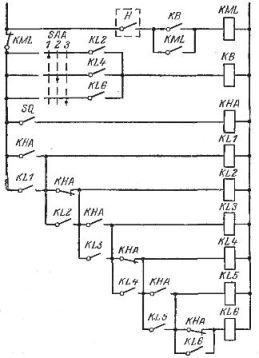
ভাত। 12. SQ পরিচিতি খোলার সময় তিনটি গণনা করার পরিকল্পনা
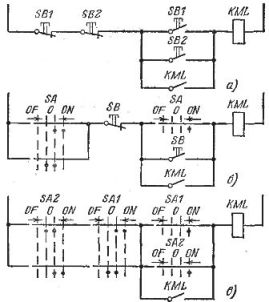
চাল। 13। দুটি জায়গা থেকে ইঞ্জিনের অপরিবর্তনীয় নিয়ন্ত্রণের স্কিমগুলি: a — দুটি বোতাম সহ, b — একটি বোতাম এবং একটি কী দিয়ে, c — দুটি কী সহ।
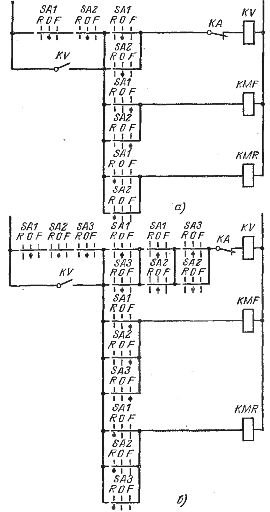
ভাত। 14. দুটি জায়গা থেকে বৈদ্যুতিক ড্রাইভের একতরফা নির্ভরশীল বিপরীত নিয়ন্ত্রণের স্কিম।
KML লাইন কন্টাক্টর দ্বারা গণনা পুনরায় সেট করা হয়; SQ কন্টাক্টরের বন্ধ সময় অবশ্যই KML কন্টাক্টরের সময়ের চেয়ে কম হবে।
একটি সামান্য বড় সংখ্যার জন্য গণনা স্কিম উপরের স্কিমগুলির সাথে সাদৃশ্য দ্বারা আঁকা যেতে পারে, কিন্তু যখন গণনা পাঁচ বা আটের বেশি হয়, বা ভোল্টেজ অদৃশ্য হয়ে গেলে গণনার ক্ষতি অগ্রহণযোগ্য, সেক্ষেত্রে সংখ্যাযুক্ত ব্যবহার করার পরামর্শ দেওয়া হয়। রিলে
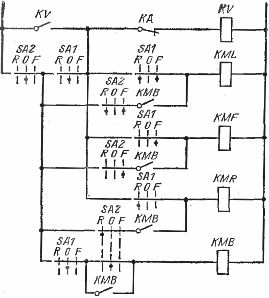
ভাত। 15. নির্ভরশীল বিপরীতমুখী ইঞ্জিন নিয়ন্ত্রণের স্কিম: a — দুই জায়গা থেকে, b — তিন জায়গা থেকে
একটি টাইপ E-526 মোটর স্টেপ কাউন্ট রিলে 30 কাউন্ট পর্যন্ত বা টাইপ E 531 পালস কাউন্ট রিলে 75টি পর্যন্ত পালস কাউন্ট ব্যবহার করা যেতে পারে৷ রিলেগুলি বিকল্প কারেন্টে কাজ করে এবং তাদের পরিচিতিগুলি যথাক্রমে 220 V এ পাওয়ার-অফ সক্ষম করে৷ এবং ডিসি 50 এবং 30 ওয়াট।
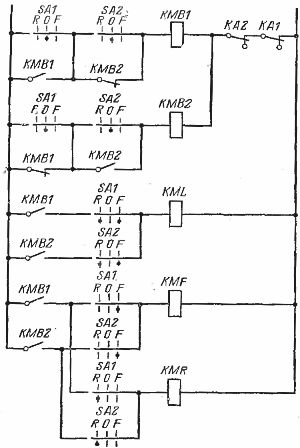
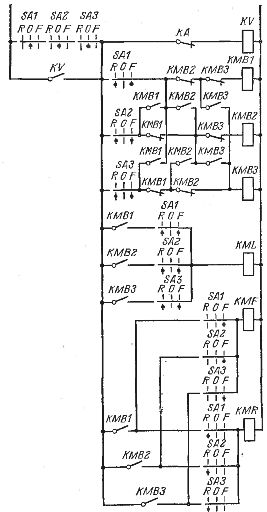
বিভিন্ন স্থান থেকে বৈদ্যুতিক মোটরের নিয়ন্ত্রণ সার্কিটগুলি নির্ভরশীল, একমুখীভাবে নির্ভরশীল এবং স্বাধীন হতে পারে (চিত্র 13)। প্রায়শই, নির্ভরশীল নিয়ন্ত্রণ স্কিমগুলি ব্যবহার করা হয় (চিত্র 15) সবচেয়ে সহজ হিসাবে। এই স্কিম অনুযায়ী, যে কোনো কন্ট্রোল ডিভাইস চালানোর সময়, অন্য ডিভাইসের হ্যান্ডেলকে শূন্য থেকে অপারেটিং পজিশনে নিয়ে যাওয়ায় মোটর বন্ধ হয়ে যায়।
দুটি (চিত্র 14) এবং তিনটি (চিত্র 16) স্থান থেকে একমুখী নির্ভরশীল নিয়ন্ত্রণের স্কিম অনুযায়ী, সুইচ SA1 সুইচ SA2 (SA2 এবং SA3) এর অবস্থান থেকে স্বাধীনভাবে নিয়ন্ত্রণ করা যেতে পারে। SA2 সুইচের নিয়ন্ত্রণ সম্ভব যখন SA1 সুইচ শূন্য অবস্থানে থাকে এবং SA3 সুইচের অবস্থানের উপর নির্ভর করে না। SA1 এবং SA2 সুইচগুলি শূন্য অবস্থানে থাকলে SA3 সুইচগুলির নিয়ন্ত্রণ সম্ভব৷
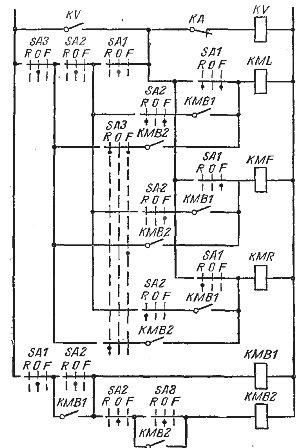
চিত্র 16. তিন-স্থানীয় পারস্পরিক মোটরের একমুখী নির্ভরশীল নিয়ন্ত্রণের পরিকল্পিত
ভাত। 17. দুটি জায়গা থেকে ইঞ্জিনের স্বাধীন বিপরীতমুখী নিয়ন্ত্রণের স্কিম।
ভাত। 18. তিনটি জায়গা থেকে ইঞ্জিনের স্বাধীন বিপরীতমুখী নিয়ন্ত্রণের স্কিম।
স্বাধীন নিয়ন্ত্রণ স্কিমগুলিতে (চিত্র 17 এবং 18), যখন ড্রাইভটি যে কোনও প্রথম সুইচ (SA1, SA2 বা SA3) দ্বারা নিয়ন্ত্রিত হয়, তখন অন্য সুইচের হ্যান্ডেলটি সরানো ড্রাইভের অপারেশনকে প্রভাবিত করে না। প্রথম কীটির হ্যান্ডেলের শূন্য অবস্থানে ফিরে আসার পরে, দ্বিতীয় কী (বা অন্য দুটি) এর হ্যান্ডেলের অবস্থান নির্বিশেষে অ্যাকচুয়েটর থামবে। দ্বিতীয় কী (বা অন্য দুটি) শূন্য অবস্থানে ফিরিয়ে দেওয়ার পরেই একটি নতুন শুরু সম্ভব।
খুব প্রায়ই তারা একটি সরলীকৃত স্কিম (চিত্র 19) অনুযায়ী দুই এবং তিনটি জায়গা থেকে ড্রাইভ নিয়ন্ত্রণ ব্যবহার করে; এর মানে হল শুধুমাত্র একটি প্রথম স্থান থেকে অগ্রাধিকারমূলক নিয়ন্ত্রণ (কী SA1)। যখন ড্রাইভটি অন্য একটি সুইচ (SA2 বা SA3) দ্বারা নিয়ন্ত্রিত হয়, তখন শূন্য অবস্থান থেকে প্রথম সুইচের হ্যান্ডেলটি সরানোর ফলে সেই সুইচটিতে নিয়ন্ত্রণ স্থানান্তরিত হয়।
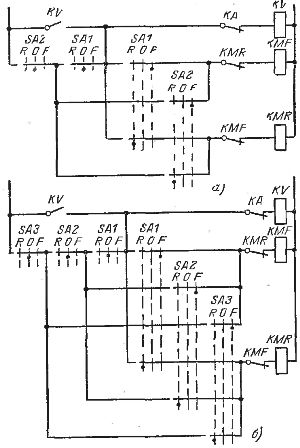
ভাত। 19. একটি বিপরীত বৈদ্যুতিক ড্রাইভ নিয়ন্ত্রণের জন্য সরলীকৃত স্কিম: a — দুই জায়গা থেকে, b — তিন জায়গা থেকে।