ইঞ্জিন গতি নিয়ন্ত্রণ ডিভাইস
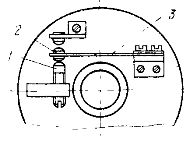
অ্যাসিঙ্ক্রোনাস বৈদ্যুতিক মোটরগুলি কাউন্টারকারেন্ট ব্রেক সার্কিটে ব্যাপকভাবে ব্যবহৃত হয়। ইন্ডাকশন স্পিড কন্ট্রোল রিলে... রিলে 5 এর ইনপুট শ্যাফ্ট, যার উপর একটি নলাকার স্থায়ী চুম্বক 4 মাউন্ট করা হয়, বৈদ্যুতিক মোটরের শ্যাফ্টের সাথে সংযুক্ত থাকে, যার কৌণিক গতি নিয়ন্ত্রণ করতে হয়।
যখন বৈদ্যুতিক মোটর ঘোরে, তখন চৌম্বক ক্ষেত্রটি ঘূর্ণমান স্টেটর 6 এর শর্ট সার্কিট 3 এর তারগুলিকে অতিক্রম করে। একটি EMF উইন্ডিংয়ে প্ররোচিত হয়, যার মান শ্যাফটের ঘূর্ণনের কৌণিক গতির সমানুপাতিক। এর প্রভাবে, কয়েলে একটি কারেন্ট উপস্থিত হয় এবং একটি মিথস্ক্রিয়া বল দেখা দেয়, যা চুম্বকের ঘূর্ণনের দিকে স্টেটর 6 ঘোরাতে থাকে।
একটি নির্দিষ্ট ঘূর্ণন গতিতে, বল এতটাই বৃদ্ধি পায় যে লিমিটার 2, সমতল স্প্রিং-এর প্রতিরোধকে অতিক্রম করে, রিলে পরিচিতিগুলিকে সুইচ করে। রিলে দুটি পরিচিতি নোড দিয়ে সজ্জিত: 1 এবং 7, যা ঘূর্ণনের দিকের উপর নির্ভর করে সুইচ করা হয়।
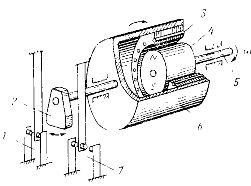
চিত্র 1. প্রবর্তক গতি নিয়ন্ত্রণ রিলে
একটি আনয়ন গতি নিয়ন্ত্রণ রিলে একটি বরং জটিল নকশা এবং কম নির্ভুলতা আছে যা শুধুমাত্র মোটা নিয়ন্ত্রণ সিস্টেমের জন্য গ্রহণযোগ্য হতে পারে। উচ্চ গতির নিয়ন্ত্রণ নির্ভুলতা একটি ট্যাকোজেনারেটর - একটি পরিমাপকারী মাইক্রো মেশিন ব্যবহার করে অর্জন করা যেতে পারে, যার টার্মিনালের ভোল্টেজ ঘূর্ণনের গতির সাথে সরাসরি সমানুপাতিক।
Tacho জেনারেটরগুলি একটি বিস্তৃত rpm পরিসীমা সহ পরিবর্তনশীল গতির ড্রাইভ প্রতিক্রিয়া সিস্টেমে ব্যবহৃত হয় এবং তাই মাত্র কয়েক শতাংশের ত্রুটি রয়েছে। সবচেয়ে সাধারণ ডিসি tachogenerators হয়.
ডুমুরে। 2 একটি ট্যাকোজেনারেটর G ব্যবহার করে একটি বৈদ্যুতিক মোটর M-এর জন্য একটি গতি নিয়ন্ত্রণ রিলে এর একটি চিত্র দেখায়, যার আর্মেচার সার্কিটে একটি ইলেক্ট্রোম্যাগনেটিক রিলে K এবং একটি নিয়ন্ত্রক রিওস্ট্যাট R অন্তর্ভুক্ত থাকে৷ যখন ট্যাকোজেনারেটরের আরমেচার টার্মিনালগুলিতে ভোল্টেজ অপারেটিং ভোল্টেজকে ছাড়িয়ে যায়, রিলে বহিরাগত সার্কিটে চালু করা হয়।
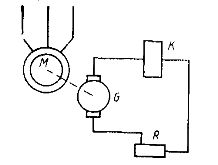
চিত্র 2. ট্যাকোজেনারেটরের সাথে গতি নিয়ন্ত্রণ রিলে
 চিত্র 3. একটি ট্যাকোমিটার সেতুর পরিকল্পিত
চিত্র 3. একটি ট্যাকোমিটার সেতুর পরিকল্পিত
আর্মেচার সার্কিটের রেজিস্ট্যান্স বাড়লে সার্কিটের নির্ভুলতা বাড়ে। অতএব, কখনও কখনও রিলে একটি মধ্যবর্তী অর্ধপরিবাহী পরিবর্ধকের মাধ্যমে ট্যাকোজেনারেটরের সাথে সংযুক্ত থাকে। এই উদ্দেশ্যে একটি স্থিতিশীল প্রতিক্রিয়া ভোল্টেজ সহ অর্ধপরিবাহী নন-কন্টাক্ট থ্রেশহোল্ড উপাদানগুলি ব্যবহার করাও সম্ভব।
সার্কিটের নির্ভরযোগ্যতা উন্নত করা যেতে পারে যদি ডিসি ট্যাকোজেনারেটর একটি যোগাযোগহীন অ্যাসিঙ্ক্রোনাস ট্যাকোজেনারেটর দ্বারা প্রতিস্থাপিত হয়।
একটি অ্যাসিঙ্ক্রোনাস ট্যাকোজেনারেটরের কাচের আকারে তৈরি একটি ফাঁপা অ-চৌম্বকীয় রটার থাকে। স্টেটরের একে অপরের 90 ° কোণে দুটি উইন্ডিং রয়েছে। কয়েলগুলির একটি একটি বিকল্প বর্তমান নেটওয়ার্কের সাথে সংযুক্ত।একটি সাইনোসয়েডাল ভোল্টেজ অন্য উইন্ডিং থেকে সরানো হয়, যা রটারের গতির সমানুপাতিক। আউটপুট ভোল্টেজের ফ্রিকোয়েন্সি সবসময় মেইনগুলির কম্পাঙ্কের সমান।
 আধুনিক ডিসি এক্সিকিউটিভ মোটরগুলিতে, ট্যাকোজেনারেটরটি মেশিনের মতো একই হাউজিংয়ে তৈরি করা হয় এবং মূল মোটরের মতো একই শ্যাফ্টে মাউন্ট করা হয়। এটি আউটপুট ভোল্টেজের লহর হ্রাস করে এবং গতি নিয়ন্ত্রণের সঠিকতা উন্নত করে।
আধুনিক ডিসি এক্সিকিউটিভ মোটরগুলিতে, ট্যাকোজেনারেটরটি মেশিনের মতো একই হাউজিংয়ে তৈরি করা হয় এবং মূল মোটরের মতো একই শ্যাফ্টে মাউন্ট করা হয়। এটি আউটপুট ভোল্টেজের লহর হ্রাস করে এবং গতি নিয়ন্ত্রণের সঠিকতা উন্নত করে।
ইলেক্ট্রোম্যাগনেটিক উত্তেজনা সহ PT-1 টাইপ ডিসি ট্যাকোজেনারেটর সাধারণত PBST সিরিজের বৈদ্যুতিক মোটরগুলিতে ব্যবহৃত হয়। উচ্চ ঘূর্ণন সঁচারক বল ডিসি মোটর আমি একটি স্থায়ী চুম্বক উত্তেজিত tacho একটি নির্মিত আছে.
যে ক্ষেত্রে ডিসি মোটর এম-এ ট্যাকোজেনারেটর নেই, আর্মেচার ইএমএফ পরিমাপ করে এর গতি নিয়ন্ত্রণ করা যেতে পারে। এর জন্য, একটি ট্যাকোমেট্রিক ব্রিজ সার্কিট ব্যবহার করা হয়, যা দুটি প্রতিরোধক দ্বারা গঠিত হয়: R1 এবং R2, আর্মেচার Ri এবং মেশিন Rdp এর অতিরিক্ত খুঁটি। ট্যাকোমিটার ব্রিজের আউটপুট ভোল্টেজ Uout = U1 — Udp, বা
Uout = (Rdp / Rdp + Ri) x E = (Rdp / Rdp + Ri) x cω
বৈদ্যুতিক মোটরের চৌম্বকীয় প্রবাহ ধ্রুবক থাকার শর্তে শেষ সমতা বৈধ। ট্যাকোমেট্রিক সেতুর আউটপুটে একটি থ্রেশহোল্ড উপাদান সহ, একটি রিলে প্রাপ্ত হয় যা ঘূর্ণনের একটি নির্দিষ্ট কৌণিক গতিতে সেট করা হয়। ব্রাশের যোগাযোগ প্রতিরোধের পরিবর্তনশীলতা এবং প্রতিরোধের গরম করার ভারসাম্যহীনতার কারণে ট্যাকোমিটার সেতুর নির্ভুলতা কম।
যদি ডিসি মোটরটি একটি কৃত্রিম বৈশিষ্ট্যের উপর কাজ করে এবং আর্মেচারে একটি বড় অতিরিক্ত প্রতিরোধ অন্তর্ভুক্ত করা হয়, তবে গতি রিলে ফাংশনটি আর্মেচার টার্মিনালগুলির সাথে সংযুক্ত একটি ভোল্টেজ রিলে দ্বারা সঞ্চালিত হতে পারে।
বৈদ্যুতিক মোটরের আর্মেচারে ভোল্টেজ Uja = E + IjaRja।
যেহেতু I = (U — E) / (Ri + Rext), আমরা Ui = (Rext / (Ri + Rext)) x E + (RI / (Ri + Rext)) x U পাই, তাহলে দ্বিতীয় পদটি উপেক্ষিত হতে পারে এবং আর্মেচার টার্মিনাল ভোল্টেজকে ইএমএফ এবং মোটরের ঘূর্ণনের গতির সাথে সরাসরি সমানুপাতিক বিবেচনা করা যেতে পারে।
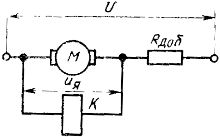
চিত্র 4. ভোল্টেজ রিলে সহ গতি নিয়ন্ত্রণ
 চিত্র 5. কেন্দ্রাতিগ গতি নিয়ন্ত্রণ রিলে
চিত্র 5. কেন্দ্রাতিগ গতি নিয়ন্ত্রণ রিলে
তাদের একটি খুব সাধারণ নকশা আছে। সেন্ট্রিফিউগাল স্পিড সুইচ... রিলেটির ভিত্তি হল একটি প্লাস্টিকের ফেস প্লেট 4, একটি শ্যাফ্টে মাউন্ট করা হয়েছে, যার ঘূর্ণনের গতি অবশ্যই নিয়ন্ত্রণ করতে হবে। একটি ফ্ল্যাট স্প্রিং 3 একটি বিশাল অস্থাবর পরিচিতি 2 এবং একটি স্থির সামঞ্জস্যযোগ্য যোগাযোগ 1 সামনের প্লেটে স্থির করা হয়েছে৷ স্প্রিংটি বিশেষ ইস্পাত দিয়ে তৈরি, যার স্থিতিস্থাপকতার মডুলাসটি কার্যত তাপমাত্রা পরিবর্তনের থেকে স্বাধীন৷
যখন মুখের প্লেটটি ঘোরে, তখন একটি কেন্দ্রাতিগ শক্তি চলমান যোগাযোগের উপর কাজ করে, যা ঘূর্ণনের একটি নির্দিষ্ট গতিতে সমতল বসন্তের প্রতিরোধকে অতিক্রম করে এবং পরিচিতিগুলিকে সুইচ করে। স্লিপ রিং এবং ব্রাশের মাধ্যমে যোগাযোগ ডিভাইসে কারেন্ট সরবরাহ করা হয়, চিত্রে দেখানো হয়নি। এই ধরনের রিলেগুলি ডিসি মাইক্রোমোটরগুলির জন্য গতি স্থিতিশীলকরণ সিস্টেমে ব্যবহৃত হয়। এর সরলতা সত্ত্বেও, সিস্টেমটি 2% এর অর্ডারে একটি ত্রুটি সহ গতি বজায় রাখে।
