ডিসি মোটর শুরু এবং বন্ধ করার জন্য স্বয়ংক্রিয় নিয়ন্ত্রণ সার্কিট
 যেকোন ইঞ্জিনের স্টার্ট পাওয়ার সার্কিট এবং কন্ট্রোল সার্কিটের নির্দিষ্ট সুইচের সাথে থাকে। এই ক্ষেত্রে, রিলে-কন্টাক্টর এবং অ-যোগাযোগ ডিভাইস ব্যবহার করা হয়। ডিসি মোটর সীমাবদ্ধ করার জন্য প্রারম্ভিক স্রোত স্টার্টিং রেসিস্টরগুলি মোটরগুলির রটার এবং আর্মেচার সার্কিটে অন্তর্ভুক্ত করা হয়, যখন মোটরগুলিকে ধাপে ধাপে ত্বরান্বিত করা হয় তখন বন্ধ হয়ে যায়। স্টার্টআপ সম্পূর্ণ হলে, স্টার্টআপ প্রতিরোধক সম্পূর্ণরূপে বাইপাস হয়।
যেকোন ইঞ্জিনের স্টার্ট পাওয়ার সার্কিট এবং কন্ট্রোল সার্কিটের নির্দিষ্ট সুইচের সাথে থাকে। এই ক্ষেত্রে, রিলে-কন্টাক্টর এবং অ-যোগাযোগ ডিভাইস ব্যবহার করা হয়। ডিসি মোটর সীমাবদ্ধ করার জন্য প্রারম্ভিক স্রোত স্টার্টিং রেসিস্টরগুলি মোটরগুলির রটার এবং আর্মেচার সার্কিটে অন্তর্ভুক্ত করা হয়, যখন মোটরগুলিকে ধাপে ধাপে ত্বরান্বিত করা হয় তখন বন্ধ হয়ে যায়। স্টার্টআপ সম্পূর্ণ হলে, স্টার্টআপ প্রতিরোধক সম্পূর্ণরূপে বাইপাস হয়।
মোটরগুলির ব্রেকিং প্রক্রিয়াটিও স্বয়ংক্রিয় হতে পারে। স্টপ কমান্ডের পরে, রিলে-কন্টাক্টর সরঞ্জামগুলির সাহায্যে, পাওয়ার সার্কিটে প্রয়োজনীয় সুইচগুলি তৈরি করা হয়। শূন্যের কাছাকাছি গতির কাছে যাওয়ার সময়, মোটরটি নেটওয়ার্ক থেকে সংযোগ বিচ্ছিন্ন হয়ে যায়। স্টার্টআপের সময়, ধাপগুলি নিয়মিত বিরতিতে বা অন্যান্য পরামিতির উপর নির্ভর করে বন্ধ করা হয়। এটি মোটরের বর্তমান এবং গতি পরিবর্তন করে।
মোটর শুরু নিয়ন্ত্রণ EMF (বা গতি), বর্তমান, সময় এবং পথের একটি ফাংশন হিসাবে সঞ্চালিত হয়।
ডিসি মোটর শুরু করার স্বয়ংক্রিয় নিয়ন্ত্রণের জন্য সাধারণ সাবসেম্বলি এবং সার্কিট
সমান্তরাল বা স্বাধীন উত্তেজনা সহ একটি ডিসি মোটর শুরু করা আর্মেচার সার্কিটে প্রবর্তিত একটি প্রতিরোধকের সাহায্যে করা হয়। ইনরাশ কারেন্ট সীমিত করার জন্য একটি প্রতিরোধকের প্রয়োজন। মোটর ত্বরিত হওয়ার সাথে সাথে স্টার্টিং রেসিস্টর ধাপে ধাপে যায়। স্টার্ট সম্পূর্ণ হলে, প্রতিরোধকটি সম্পূর্ণভাবে বাইপাস হয়ে যাবে এবং মোটরটি তার প্রাকৃতিক যান্ত্রিক বৈশিষ্ট্যে ফিরে আসবে (চিত্র 1)। স্টার্টআপের সময়, ইঞ্জিনটি কৃত্রিম বৈশিষ্ট্য 1, তারপর 2, এবং প্রতিরোধকের চালনা করার পরে - প্রাকৃতিক বৈশিষ্ট্য 3 অনুসারে ত্বরিত হয়।
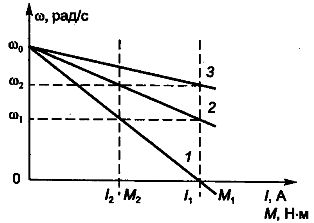
ভাত। 1. সমান্তরাল উত্তেজনা সহ একটি DC মোটরের যান্ত্রিক এবং ইলেক্ট্রোমেকানিক্যাল বৈশিষ্ট্য (ω — ঘূর্ণনের কৌণিক গতি; I1 M1 — মোটরটির সর্বোচ্চ কারেন্ট এবং টর্ক; I2 M2 — কারেন্ট এবং স্যুইচিং মুহূর্ত)
EMF ফাংশনে DC মোটর (DCM) এর স্টার্টিং সার্কিট নোডটি বিবেচনা করুন (চিত্র 2)।
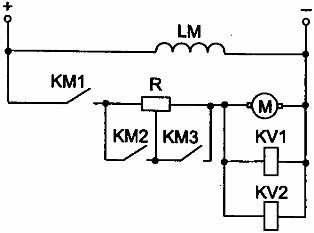
ভাত। 2. EMF ফাংশনে সমান্তরাল উত্তেজনার DCT এর প্রারম্ভিক সার্কিট নোড
EMF (বা গতি) ফাংশন রিলে, ভোল্টেজ এবং কন্টাক্টর দ্বারা নিয়ন্ত্রিত হয়। ভোল্টেজ রিলেগুলি বিভিন্ন আর্মেচার ইএমএফ মানগুলিতে কাজ করার জন্য কনফিগার করা হয়েছে। যখন কন্টাক্টর কেএম 1 চালু থাকে, তখন শুরু করার সময় কেভি রিলেটির ভোল্টেজ অপারেশনের জন্য যথেষ্ট নয়। যখন মোটর ত্বরিত হয় (মোটর ইএমএফ বৃদ্ধির কারণে), KV1 রিলে সক্রিয় হয়, তারপর KV2 (রিলে অ্যাক্টিভেশন ভোল্টেজগুলির সংশ্লিষ্ট মান থাকে); এর মধ্যে রয়েছে ত্বরণ কন্টাক্টর KM2, KMZ, এবং আর্মেচার সার্কিটের রেজিস্টরগুলিকে বন্ধ করা হয়েছে (কন্টাক্টর স্যুইচিং সার্কিটগুলি ডায়াগ্রামে দেখানো হয়নি; LM হল উত্তেজনা উইন্ডিং)।
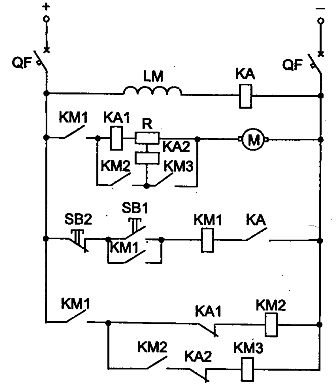
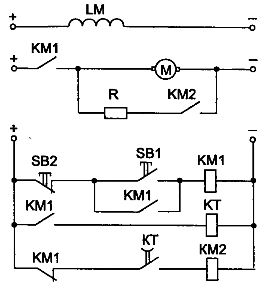
আসুন EMF ফাংশনে একটি ডিসি মোটর শুরু করার স্কিমটি দেখি (চিত্র 3)। মোটরের কৌণিক বেগ প্রায়ই পরোক্ষভাবে স্থির করা হয়, যেমনগতি সম্পর্কিত পরিমাণ পরিমাপ। একটি ডিসি মোটর জন্য, যেমন একটি মান EMF. শুরু নিম্নরূপ বাহিত হয়. QF সার্কিট ব্রেকার চালু হয়, মোটর ক্ষেত্রটি পাওয়ার সাপ্লাইয়ের সাথে সংযুক্ত থাকে। KA রিলে সক্রিয় করে এবং তার যোগাযোগ বন্ধ করে।
সার্কিটের অবশিষ্ট ডিভাইসগুলি তাদের আসল অবস্থানে থাকে। ইঞ্জিন চালু করতে, আপনাকে অবশ্যই করতে হবে বাটনটি চাপুন এসবি 1 "স্টার্ট", যার পরে কন্টাক্টর কেএম 1 সক্রিয় হয় এবং মোটরটিকে পাওয়ার উত্সের সাথে সংযুক্ত করে। কন্টাক্টর KM1 স্ব-চালিত। ডিসি মোটরটি মোটর আর্মেচার সার্কিট রেসিস্টর R দিয়ে ত্বরান্বিত হয়।
মোটরের গতি বাড়ার সাথে সাথে এর ইএমএফ এবং রিলে KV1 এবং KV2 এর কয়েলে ভোল্টেজ বৃদ্ধি পায়। গতি ω1 (চিত্র 1 দেখুন।) রিলে KV1 সক্রিয় করা হয়েছে। এটি কন্টাক্টর সার্কিট KM2-এ তার যোগাযোগ বন্ধ করে দেয়, যা ট্রিপ করে এবং শর্ট-সার্কিট তার পরিচিতির সাথে শুরু প্রতিরোধকের প্রথম পর্যায়ে যায়। গতিতে ω2 রিলে KV2 শক্তিযুক্ত হয়। এর যোগাযোগের সাথে, এটি KMZ কন্টাক্টরের সরবরাহ সার্কিটটি বন্ধ করে দেয়, যা, যখন সক্রিয় হয়, একটি যোগাযোগের সাথে, শর্ট-সার্কিট শুরু হয় রোধের দ্বিতীয় প্রারম্ভিক পর্যায়ে। ইঞ্জিন তার প্রাকৃতিক যান্ত্রিক বৈশিষ্ট্যে পৌঁছায় এবং টেকঅফ বন্ধ করে দেয়।
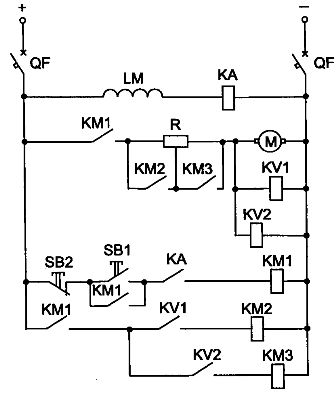
ভাত। 3. EMF ফাংশনে সমান্তরাল উত্তেজনার DCT শুরু করার পরিকল্পিত
সার্কিটের সঠিক ক্রিয়াকলাপের জন্য, গতি ω1 এবং রিলে KV2 ω2 গতিতে কাজ করার জন্য EMF-এ কাজ করার জন্য ভোল্টেজ রিলে KV1 সেট করা প্রয়োজন।
ইঞ্জিন বন্ধ করতে, Stop বাটন SB2 টিপুন। বৈদ্যুতিক সার্কিট সংযোগ বিচ্ছিন্ন করতে, QF সার্কিট ব্রেকার খুলুন।
বর্তমান ফাংশন একটি বর্তমান রিলে দ্বারা নিয়ন্ত্রিত হয়. ফ্লাক্স ফাংশনে ডিসি মোটর স্টার্টার সার্কিট নোড বিবেচনা করুন। চিত্রে দেখানো চিত্রে।4, ওভারকারেন্ট রিলে ব্যবহার করা হয়, যা ইনরাশ কারেন্ট I1 এ উঠতে থাকে এবং ন্যূনতম কারেন্ট I2 এ ড্রপ আউট হয় (চিত্র 1 দেখুন)। বর্তমান রিলেগুলির অভ্যন্তরীণ প্রতিক্রিয়া সময় অবশ্যই যোগাযোগকারীর প্রতিক্রিয়া সময়ের চেয়ে কম হতে হবে।
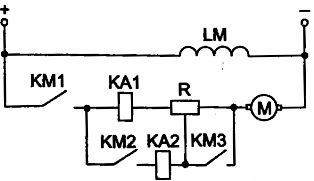
ভাত। 4. বর্তমানের উপর নির্ভর করে সমান্তরাল উত্তেজনা ডিসিটির প্রারম্ভিক সার্কিট নোড
আরমেচার সার্কিটে সম্পূর্ণরূপে ঢোকানো প্রতিরোধকের সাথে মোটর ত্বরণ শুরু হয়। ইঞ্জিন ত্বরান্বিত হওয়ার সাথে সাথে কারেন্ট হ্রাস পায়, বর্তমান I2 এর সাথে, রিলে KA1 অদৃশ্য হয়ে যায় এবং এর যোগাযোগের সাথে যোগাযোগকারী KM2 এর সরবরাহ সার্কিট বন্ধ করে দেয়, যা তার যোগাযোগের সাথে প্রারম্ভিক প্রতিরোধকের প্রথম যোগাযোগকে বাইপাস করে। একইভাবে, রোধের দ্বিতীয় প্রারম্ভিক পর্যায়টি শর্ট-সার্কিট (রিলে KA2, কন্টাক্টর KMZ)। কন্টাক্টর পাওয়ার সার্কিটগুলি ডায়াগ্রামে দেখানো হয় না। মোটর শুরু করার শেষে, আর্মেচার সার্কিটের প্রতিরোধকটি ব্রিজ করা হবে।
একটি ফ্লাক্স ফাংশন হিসাবে একটি ডিসি মোটর শুরু করার জন্য সার্কিট বিবেচনা করুন (চিত্র 5)। প্রতিরোধক পদক্ষেপগুলির প্রতিরোধগুলি নির্বাচন করা হয় যাতে মোটরটি চালু করা হয় এবং পদক্ষেপগুলি বন্ধ করা হয়, আর্মেচার সার্কিটে বর্তমান I1 এবং যে মুহুর্তে M1 অনুমতিযোগ্য মাত্রা অতিক্রম না করে।
একটি ডিসি মোটর শুরু হচ্ছে QF সার্কিট ব্রেকার চালু করে এবং "স্টার্ট" বোতাম SB1 টিপে সঞ্চালিত হয়। এই ক্ষেত্রে, contactor KM1 সক্রিয় করা হয় এবং তার পরিচিতি বন্ধ করে দেয়। ইনরাশ কারেন্ট I1 মোটরের পাওয়ার সার্কিটের মধ্য দিয়ে যায়, যার প্রভাবে ওভারকারেন্ট রিলে KA1 সক্রিয় হয়। এর পরিচিতি খোলে এবং কন্টাক্টর KM2 পাওয়ার পায় না।
ভাত। 5. বর্তমানের একটি ফাংশন হিসাবে সমান্তরাল উত্তেজনা ডিসিটি স্টার্ট-আপের পরিকল্পিত
যখন কারেন্ট ন্যূনতম মান I2-এ নেমে আসে, তখন ওভারকারেন্ট রিলে KA1 নেমে যায় এবং এর যোগাযোগ বন্ধ করে দেয়।কন্টাক্টর KM2 সক্রিয় করা হয় এবং এর প্রধান যোগাযোগের মাধ্যমে স্টার্টিং রেসিস্টর এবং রিলে KA1 এর প্রথম অংশটি বন্ধ করে দেয়। স্যুইচ করার সময়, কারেন্ট বেড়ে যায় I1 মানের।
যখন কারেন্ট আবার I1 এর মান বৃদ্ধি পায়, তখন কন্টাক্টর KM1 চালু হয় না, কারণ এর কয়েলটি পরিচিতি KM2 দ্বারা বাইপাস হয়। বর্তমান I1 এর প্রভাবের অধীনে, রিলে KA2 সক্রিয় হয় এবং এর যোগাযোগ খোলে। যখন ত্বরণ প্রক্রিয়ায় কারেন্ট আবার I2 এর মানতে নেমে যায়, তখন রিলে KA2 নেমে যায় এবং কন্টাক্টর KMZ চালু হয়। শুরু সম্পূর্ণ, ইঞ্জিন তার প্রাকৃতিক যান্ত্রিক বৈশিষ্ট্য সঙ্গে কাজ করে.
সার্কিটের সঠিক কার্যকারিতার জন্য, এটি প্রয়োজনীয় যে রিলে KA1 এবং KA2 এর প্রতিক্রিয়া সময় যোগাযোগকারীদের প্রতিক্রিয়া সময়ের চেয়ে কম। মোটর বন্ধ করতে, SB2 বোতাম টিপুন এবং সার্কিট সংযোগ বিচ্ছিন্ন করতে QF সার্কিট ব্রেকার বন্ধ করুন।
টাইম কন্ট্রোল একটি টাইম রিলে এবং সংশ্লিষ্ট কন্টাক্টর ব্যবহার করে সম্পন্ন করা হয় যা তাদের পরিচিতিগুলির সাথে রোধের ধাপগুলিকে শর্ট-সার্কিট করে।
প্রারম্ভিক সার্কিট নোড ডিসি মোটরকে সময়ের একটি ফাংশন হিসাবে বিবেচনা করুন (চিত্র 6)। টাইম রিলে কেটি অবিলম্বে সক্রিয় হয় যখন খোলার পরিচিতি KM1 এর মাধ্যমে কন্ট্রোল সার্কিটে ভোল্টেজ উপস্থিত হয়। পরিচিতি KM1 খোলার পরে, টাইম রিলে KT তার পাওয়ার সাপ্লাই হারায় এবং সময়ের বিলম্বের সাথে তার যোগাযোগ বন্ধ করে দেয়। কন্টাক্টর KM2 সময়ের ব্যবধানের পর টাইম রিলে টাইম বিলম্বের সমান শক্তি পায়, এর যোগাযোগ বন্ধ করে দেয় এবং আর্মেচার সার্কিটে রেজিস্ট্যান্স বন্ধ করে দেয়।
ভাত। 6. সময়ের একটি ফাংশন হিসাবে সমান্তরাল উত্তেজনার DCT শুরু সার্কিট নোড
সময়ের ফাংশনে নিয়ন্ত্রণের সুবিধার মধ্যে রয়েছে নিয়ন্ত্রণের সহজতা, ত্বরণ এবং হ্রাস প্রক্রিয়ার স্থিতিশীলতা, মধ্যবর্তী গতিতে বৈদ্যুতিক ড্রাইভের বিলম্বের অভাব।
সময়ের একটি ফাংশন হিসাবে একটি ডিসি মোটর সমান্তরাল উত্তেজনা শুরু করার জন্য সার্কিট বিবেচনা করুন। ডুমুরে। 7 একটি অপরিবর্তনীয় স্টার্ট ডিসি সমান্তরাল উত্তেজনা মোটরের একটি চিত্র দেখায়। লঞ্চ দুটি পর্যায়ে সঞ্চালিত হয়. সার্কিট বোতাম SB1 «স্টার্ট» এবং SB2 «স্টপ», contactors KM1 ব্যবহার করে ... KMZ, ইলেক্ট্রোম্যাগনেটিক টাইম রিলে KT1, KT2। QF ব্রেকার চালু হয়। এই ক্ষেত্রে, টাইম রিলে KT1 এর কুণ্ডলী শক্তি গ্রহণ করে এবং কন্টাক্টর KM2 এর সার্কিটে তার যোগাযোগ খোলে। ইঞ্জিনটি "স্টার্ট" বোতাম SB1 টিপে শুরু হয়। কন্টাক্টর KM1 শক্তি গ্রহণ করে এবং এর প্রধান যোগাযোগের সাথে মোটরটিকে আর্মেচার সার্কিটের একটি প্রতিরোধকের সাথে একটি পাওয়ার উত্সের সাথে সংযুক্ত করে।
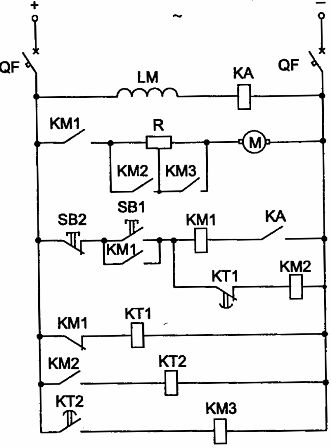
ভাত। 7. সময়ের একটি ফাংশন হিসাবে একটি DC মোটর অপরিবর্তনীয় শুরুর পরিকল্পিত
আন্ডারকারেন্ট রিলে KA উত্তেজনা সার্কিটের বাধা থেকে মোটরকে রক্ষা করতে কাজ করে। স্বাভাবিক ক্রিয়াকলাপের সময়, কেএ রিলে শক্তি দেয় এবং KM1 কন্টাক্টর সার্কিটে এর যোগাযোগ বন্ধ হয়ে যায়, অপারেশনের জন্য KM1 কন্টাক্টর প্রস্তুত করে। যখন উত্তেজনা সার্কিট ভেঙ্গে যায়, KA রিলে বন্ধ হয়ে যায়, তার যোগাযোগ খোলে, তারপর KM1 কন্টাক্টর বন্ধ হয়ে যায় এবং ইঞ্জিন বন্ধ হয়ে যায়। যখন কন্টাক্টর KM1 সক্রিয় হয়, তখন এর ব্লকিং কন্টাক্ট বন্ধ হয়ে যায় এবং KT1 রিলে সার্কিটে KM1 খোলে, যা একটি সময়ের বিলম্বের সাথে তার যোগাযোগ বন্ধ করে দেয়।
রিলে KT1 এর সময় বিলম্বের সমান সময়ের ব্যবধানের পরে, ত্বরণকারী কন্টাক্টর KM2 এর সরবরাহ সার্কিটটি বন্ধ হয়ে যায়, যা ট্রিগার হয় এবং এর প্রধান যোগাযোগ শর্ট-সার্কিটের সাথে শুরু হয় রোধের এক পর্যায়ে। একই সময়ে, সময় রিলে KT2 শক্তিপ্রাপ্ত হয়। ইঞ্জিন ত্বরান্বিত হয়। KT2 রিলে বিলম্বের সমান সময়ের ব্যবধানের পরে, KT2 পরিচিতি বন্ধ হয়ে যায়, KMZ ত্বরণ কন্টাক্টর সক্রিয় হয় এবং এর প্রধান যোগাযোগের সাথে আর্মেচার সার্কিটে স্টার্টিং রেসিস্টরের দ্বিতীয় পর্যায়ে থাকে। শুরু সম্পূর্ণ এবং ইঞ্জিন তার প্রাকৃতিক যান্ত্রিক বৈশিষ্ট্য ফিরে.
সাধারণ ডিসি ব্রেক কন্ট্রোল সার্কিট ইউনিট
ডিসি মোটর স্বয়ংক্রিয় নিয়ন্ত্রণ ব্যবস্থা গতিশীল ব্রেকিং, বিপরীত ব্রেকিং এবং পুনর্জন্মগত ব্রেকিং ব্যবহার করে।
গতিশীল ব্রেকিং-এ, মোটরের আর্মেচার উইন্ডিংকে একটি অতিরিক্ত প্রতিরোধের জন্য বন্ধ করা এবং উত্তেজনা ওয়াইন্ডিংকে সক্রিয় রেখে দেওয়া প্রয়োজন। এই ব্রেকিং গতির একটি ফাংশন এবং সময়ের ফাংশন হিসাবে করা যেতে পারে।
গতিশীল ব্রেকিংয়ের সময় গতির ফাংশন (EMF) হিসাবে নিয়ন্ত্রণ ডুমুরে দেখানো স্কিম অনুযায়ী করা যেতে পারে। 8. যখন KM1 কন্টাক্টর বন্ধ থাকে, তখন মোটর আর্মেচারটি মেইন থেকে সংযোগ বিচ্ছিন্ন হয়ে যায়, কিন্তু সংযোগ বিচ্ছিন্ন হওয়ার মুহূর্তে এর টার্মিনালগুলিতে ভোল্টেজ থাকে। ভোল্টেজ রিলে কেভি কনট্যাক্টর কেএম 2 এর সার্কিটে এর যোগাযোগকে পরিচালনা করে এবং বন্ধ করে দেয়, যা এর যোগাযোগের সাথে মোটরের আর্মেচার বন্ধ করে রেসিস্টর আর এর সাথে।
শূন্যের কাছাকাছি গতিতে, কেভি রিলে শক্তি হারায়। ন্যূনতম গতি থেকে ফুল স্টপ পর্যন্ত আরও হ্রাস প্রতিরোধের একটি স্থির মুহূর্তের ক্রিয়ায় ঘটে।ব্রেকিং দক্ষতা বাড়ানোর জন্য, ব্রেকিংয়ের দুই বা তিনটি ধাপ প্রয়োগ করা যেতে পারে।
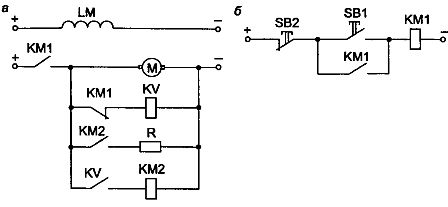
ভাত। 8. EMF ফাংশনে গতিশীল ব্রেকিংয়ের স্বয়ংক্রিয় নিয়ন্ত্রণের জন্য সার্কিটের নোড: a — পাওয়ার সার্কিট; b - নিয়ন্ত্রণ সার্কিট
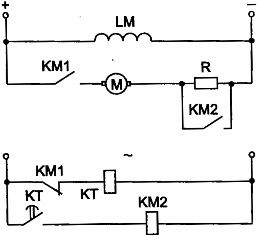
সময়ের একটি ফাংশন হিসাবে গতিশীল ব্রেকিং ধ্রুবক মোটর স্বাধীন উত্তেজনা ডুমুর দেখানো স্কিম অনুযায়ী বাহিত হয়. নয়টি
ভাত। 9. সময়ের ফাংশন হিসাবে স্বাধীন উত্তেজনার DCT গতিশীল ব্রেকিং সার্কিটের নোড
যখন ইঞ্জিন চলছে, সময় রিলে KT চালু থাকে, কিন্তু ব্রেক কন্টাক্টর KM2 এর সার্কিট খোলা থাকে। থামাতে, আপনাকে অবশ্যই "স্টপ" বোতাম SB2 টিপুন। Contactor KM1 এবং সময় রিলে KT শক্তি হারান; কন্টাক্টর KM2 সক্রিয় করা হয়েছে কারণ কন্টাক্টর KM2 এর সার্কিটে যোগাযোগ KM1 বন্ধ হয়ে যায় এবং টাইম রিলে KT-এর পরিচিতি সময় বিলম্বের সাথে খোলে।
টাইম রিলে টাইমিংয়ের জন্য, কন্টাক্টর KM2 পাওয়ার পায়, তার যোগাযোগ বন্ধ করে এবং মোটর আর্মেচারকে অতিরিক্ত রেসিস্টর R-এর সাথে সংযুক্ত করে। মোটরের একটি গতিশীল স্টপ সঞ্চালিত হয়। এর শেষে, KT রিলে, কিছু সময় পরে, তার পরিচিতি খোলে এবং KM2 কন্টাক্টরটিকে নেটওয়ার্ক থেকে সংযোগ বিচ্ছিন্ন করে। সম্পূর্ণ স্টপে আরও ব্রেকিং করা হয় প্রতিরোধের মুহুর্তের প্রভাবে।
বিপরীত কর্ম ব্রেকিং এ, মোটর EMF এবং প্রধান ভোল্টেজ অনুযায়ী কাজ করে। বর্তমান সীমাবদ্ধ করার জন্য, সার্কিটে একটি প্রতিরোধক ঢোকানো হয়।
ডিসি মোটর উত্তেজনা নিয়ন্ত্রণ
মোটরের ফিল্ড ওয়াইন্ডিং এর একটি উল্লেখযোগ্য ইন্ডাকট্যান্স রয়েছে এবং যদি মোটরটি দ্রুত বন্ধ করা হয় তবে এটিতে একটি বড় ভোল্টেজ উপস্থিত হতে পারে, যার ফলে উইন্ডিং এর নিরোধক ভেঙ্গে যাবে। এটি প্রতিরোধ করতে, আপনি ডুমুরে দেখানো সার্কিট নোডগুলি ব্যবহার করতে পারেন।10. নির্বাপক প্রতিরোধটি ডায়োডের মাধ্যমে উত্তেজনা কুণ্ডলীর সাথে সমান্তরালভাবে চালু করা হয় (চিত্র 10, খ)। অতএব, সুইচ অফ করার পরে, কারেন্ট অল্প সময়ের জন্য প্রতিরোধের মধ্য দিয়ে যায় (চিত্র 10, ক)।

ভাত। 10. quenching resistance চালু করার জন্য সার্কিটের নোড: a — quenching resistance সমান্তরালভাবে সংযুক্ত থাকে; b — quenching resistance ডায়োডের মাধ্যমে চালু করা হয়।
উত্তেজনা সার্কিটের বাধার বিরুদ্ধে সুরক্ষা ডুমুরে দেখানো স্কিম অনুসারে একটি আন্ডারকারেন্ট রিলে ব্যবহার করে সঞ্চালিত হয়। এগারো

ভাত। 11. উত্তেজনা সার্কিটের বাধার বিরুদ্ধে সুরক্ষা: a — পাওয়ার এক্সিটেশন সার্কিট; b - নিয়ন্ত্রণ সার্কিট
উত্তেজনা কুণ্ডলীতে বিরতির ক্ষেত্রে, রিলে KA ডি-এনার্জীজ করে এবং কন্টাক্টর কেএম এর সার্কিট সংযোগ বিচ্ছিন্ন করে।