নিয়ন্ত্রণ স্কিম ডিজাইন করার জন্য একটি স্বজ্ঞাত পদ্ধতি
 স্বজ্ঞাত পদ্ধতি - বিভিন্ন মেকানিজমের অটোমেশনে বিভিন্ন ডিজাইন সংস্থায় অর্জিত অভিজ্ঞতার ভিত্তিতে নিয়ন্ত্রণ স্কিমগুলি বিকাশের একটি পদ্ধতি। এটি ডিজাইনার এর প্রকৌশল অন্তর্দৃষ্টি উপর ভিত্তি করে.
স্বজ্ঞাত পদ্ধতি - বিভিন্ন মেকানিজমের অটোমেশনে বিভিন্ন ডিজাইন সংস্থায় অর্জিত অভিজ্ঞতার ভিত্তিতে নিয়ন্ত্রণ স্কিমগুলি বিকাশের একটি পদ্ধতি। এটি ডিজাইনার এর প্রকৌশল অন্তর্দৃষ্টি উপর ভিত্তি করে.
শুধুমাত্র একজন যিনি পূর্বের সমস্ত অভিজ্ঞতা গ্রহণ করেছেন এবং স্কিমগুলি আঁকার ক্ষেত্রে নির্দিষ্ট ক্ষমতা রাখেন, যিনি বিমূর্তভাবে চিন্তা করতে পারেন এবং যুক্তিযুক্তভাবে যুক্তি দিতে পারেন, তিনি এই পদ্ধতিটি পুরোপুরি আয়ত্ত করতে পারেন। এর জটিলতা সত্ত্বেও, বেশিরভাগ বৈদ্যুতিক ডিজাইনাররা স্বজ্ঞাত পদ্ধতিটি ব্যাপকভাবে ব্যবহার করেন।
উদাহরণস্বরূপ, একটি পুশ লিভারের একটি সরলীকৃত কাইনেমেটিক ডায়াগ্রাম বিবেচনা করুন (চিত্র 1)। যখন চাকা 5 ঘড়ির কাঁটার দিকে ঘোরে, তখন লিভার 4 লিভার 1 কে অক্ষ O এর কাছাকাছি ঘোরায়, যার ফলে লিভার 2 এর সাথে জুতা 3 কে অনুবাদ করতে বাধ্য করে। চাকা 5 এর আরও ঘূর্ণনের সাথে, লিভার 1 এর চলাচলের দিকটি পরিবর্তিত হয় এবং জুতাটি তার আসল অবস্থানে ফিরে আসে, যার পরে ইঞ্জিনটি বন্ধ করতে হবে।
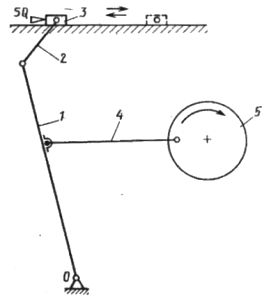
ভাত। 1. লিভার পুশার নিয়ন্ত্রণের পরিকল্পিত চিত্র
বিবেচিত প্রক্রিয়াটি একটি পুশিং ডিভাইসের একটি সাধারণ প্রতিনিধি।প্রথম চক্রে, প্রক্রিয়াটি চালু এবং চলমান। দ্বিতীয় পরিমাপে এটি কাজ করে না। যে চক্রে মেকানিজম কাজ করে না তাকে শূন্য বলে। যদিও জুতাটি সম্পূর্ণরূপে আদান-প্রদানকারী (সামনে এবং পিছনে), একটি নন-রিভার্সিবল বৈদ্যুতিক মোটর প্রপালশনের জন্য ব্যবহার করা যেতে পারে।
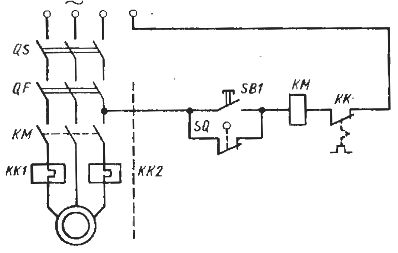
লিভার-পিস্টন বৈদ্যুতিক মোটরের কন্ট্রোল সার্কিট দুটি অংশ নিয়ে গঠিত (চিত্র 1 এ তারা একটি বিন্দুযুক্ত লাইন দ্বারা পৃথক করা হয়েছে): পাওয়ার সার্কিট এবং নিয়ন্ত্রণ সার্কিট।
পাওয়ার সার্কিটের উপাদানগুলির উদ্দেশ্য বিবেচনা করুন। কিউএস সুইচে থ্রি-ফেজ কারেন্ট সরবরাহ করা হয়, যা ম্যাগনেটিক স্টার্টারের মেরামত বা ক্ষতির ক্ষেত্রে বৈদ্যুতিক মোটরের পাওয়ার সাপ্লাই বন্ধ করে দেয়। তারপর সার্কিট ব্রেকারের মধ্য দিয়ে কারেন্ট প্রবাহিত হয় যার QF রিলিজ ডায়াগ্রামে দেখানো হয়েছে। এটি শর্ট সার্কিট স্রোতের ক্ষেত্রে ড্রাইভে পাওয়ার সাপ্লাই রক্ষা এবং সংযোগ বিচ্ছিন্ন করার জন্য ডিজাইন করা হয়েছে। চৌম্বকীয় স্টার্টার KM-এর প্রধান পরিচিতিগুলি বৈদ্যুতিক মোটর M এর উইন্ডিং চালু বা বন্ধ করে।
তাপীয় রিলে কেকে 1 এবং কেকে 2, যার গরম করার উপাদানগুলি পাওয়ার সার্কিটে দেখানো হয়েছে, বৈদ্যুতিক মোটরকে দীর্ঘায়িত ওভারলোড থেকে রক্ষা করার জন্য ডিজাইন করা হয়েছে:
নিয়ন্ত্রণ স্কিম নিম্নরূপ কাজ করে। আপনি যখন স্টার্ট বোতাম SB1 টিপুন, তখন চৌম্বকীয় স্টার্টার KM-এর কয়েলটি শক্তিপ্রাপ্ত হয় এবং তাই KM-এর সরবরাহ সার্কিটের পরিচিতিগুলি বন্ধ হয়ে যায় এবং বৈদ্যুতিক প্রবাহ মোটর উইন্ডিংয়ে প্রবেশ করে। মোটর রটারটি ঘোরানো হয় এবং ড্রামটি এগিয়ে যেতে শুরু করে। একই সময়ে, এটি সীমা সুইচ SQ এর লিভার থেকে দূরে সরে যায় এবং এর পরিচিতিগুলি বন্ধ হয়ে যায়।
যখন স্টার্ট বোতাম SB1 প্রকাশ করা হয় এবং এর পরিচিতিগুলি খোলা হয়, তখন চৌম্বক স্টার্টারের KM কয়েল সীমা সুইচ SQ-এর পরিচিতিগুলির মাধ্যমে পাওয়ার পাবে।এগিয়ে যাওয়ার পরে, এবং তারপরে পিছনের দিকে, পিস্টন সীমা সুইচ SQ-এর লিভার টিপবে, এর পরিচিতিগুলি খুলবে এবং KM-এর কয়েলটি বন্ধ হয়ে যাবে। এটি পাওয়ার সার্কিটের KM পরিচিতিগুলিকে বৈদ্যুতিক মোটর খুলতে এবং বন্ধ করে দেবে।
বিবেচিত সার্কিটে শক্তি এবং নিয়ন্ত্রণ সার্কিট রয়েছে। ভবিষ্যতে, শুধুমাত্র নিয়ন্ত্রণ স্কিম বিবেচনা করা হবে.
ফাংশন দ্বারা, i.e. উদ্দেশ্য অনুসারে, সার্কিটের ক্রিয়াকলাপের সাথে জড়িত সমস্ত উপাদানকে তিনটি গ্রুপে ভাগ করা যেতে পারে: নিয়ন্ত্রণ যোগাযোগ, মধ্যবর্তী উপাদান এবং নির্বাহী উপাদান।
কন্ট্রোল কন্টাক্ট হল সেই উপাদান যা দিয়ে কমান্ড জারি করা হয় (নিয়ন্ত্রণ বোতাম, সুইচ, সীমা সুইচ, প্রাথমিক রূপান্তরকারী, রিলে পরিচিতি, ইত্যাদি)।
মধ্যবর্তী উপাদানগুলির নামটি নির্দেশ করে যে তারা নিয়ন্ত্রণ এবং নির্বাহী উপাদানগুলির মধ্যে একটি মধ্যবর্তী অবস্থান দখল করে। রিলে-কন্টাক্ট সার্কিটে, তারা টাইম রিলে এবং ইন্টারমিডিয়েট রিলে এবং নন-কন্টাক্ট সার্কিটে — যুক্তির পথ.
এক্সিকিউটিভ উপাদান হল এক্সিকিউটিভ মেকানিজম। যাইহোক, কন্ট্রোল সার্কিটগুলি বিকাশ করার সময়, ড্রাইভ প্রক্রিয়াগুলি নিজেরাই (বৈদ্যুতিক মোটর বা গরম করার উপাদান) ব্যবহার করা হয় না, তবে যে ডিভাইসগুলি তাদের অন্তর্ভুক্ত করে, যেমন চৌম্বকীয় স্টার্টার, কন্টাক্টর ইত্যাদি
সমস্ত নিয়ন্ত্রণ পরিচিতি, তাদের কার্যকরী নীতি অনুসারে, পাঁচ প্রকারে বিভক্ত: শর্ট অ্যাকশনের সাথে যোগাযোগ শুরু করুন (পিসি), লং অ্যাকশনের সাথে যোগাযোগ শুরু করুন (পিডি), শর্ট অ্যাকশনের সাথে যোগাযোগ বন্ধ করুন (ওকে), দীর্ঘ অ্যাকশনের সাথে যোগাযোগ বন্ধ করুন (OD) , স্টার্ট-স্টপ পরিচিতি (সফ্টওয়্যার)। এই পরিচিতিগুলিকে প্রধান বলা হয়।
সাইক্লিক মেকানিজমের নিয়ন্ত্রণে সমস্ত সাধারণ পরিচিতির অপারেশনের সাইক্লোগ্রামগুলি চিত্রে দেখানো হয়েছে। 2.
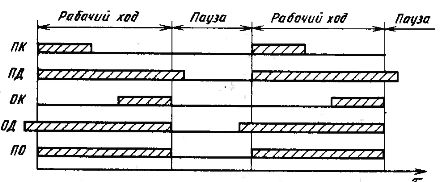
ভাত। 2.নিয়ন্ত্রণ যোগাযোগের সাইক্লোগ্রাম
পাঁচটি পরিচিতির প্রত্যেকটি নির্দিষ্ট সময়ে কাজ শুরু করে (বন্ধ হয়) এবং শেষ হয় (খোলে)। সুতরাং, প্রারম্ভিক পরিচিতিগুলি কার্যক্ষম স্ট্রোকের শুরুর সাথে একসাথে তাদের কাজ শুরু করে, তবে ওয়ার্কিং স্ট্রোকের সময় YAK পরিচিতি কাজ করা বন্ধ করে দেয়, OD - বিরতির সময়, অর্থাৎ, তারা শুধুমাত্র স্যুইচ অফ করার মুহুর্তে একে অপরের থেকে পৃথক হয় ( খোলা)।
পরিচিতি বন্ধ করা, যা, পরিচিতি শুরু করার বিপরীতে, কার্যকারী স্ট্রোকের সমাপ্তির সাথে একই সময়ে কাজ করা বন্ধ করে, অন্তর্ভুক্তির (বন্ধ) মুহুর্তগুলিতে পৃথক হয়। স্টপ কন্টাক্ট ওকে ওয়ার্কিং স্ট্রোকের সময় তার ক্রিয়াকলাপ শুরু করে এবং যোগাযোগ OD - বিরতির সময়। শুধুমাত্র সফ্টওয়্যারের পরিচিতিই ওয়ার্কিং কোর্সের শুরুর সাথে একসাথে কাজ শুরু করে এবং এর শেষের সাথে শেষ হয়।
বিবেচিত পাঁচটি প্রধান পরিচিতির সাহায্যে, নির্বাহী এবং মধ্যবর্তী উপাদানগুলিকে নিয়ন্ত্রণ করার জন্য চারটি স্কিম পাওয়া সম্ভব, যাকে বলা হয় সাধারণ স্কিম (চিত্র 3)।

ভাত। 3. এক্সিকিউটিভ এবং ইন্টারমিডিয়েট সার্কিটের জন্য সাধারণ নিয়ন্ত্রণ স্কিম
প্রথম সাধারণ সার্কিট (চিত্র 3, ক) শুধুমাত্র একটি সফ্টওয়্যার নিয়ন্ত্রণ যোগাযোগ আছে। যদি এটি বন্ধ থাকে, তাহলে অ্যাকচুয়েটর X এর মধ্য দিয়ে বৈদ্যুতিক প্রবাহ প্রবাহিত হয়, এবং যদি এটি খোলা থাকে তবে কোন কারেন্ট প্রবাহিত হয় না। PO পরিচিতির নিজস্ব অর্থ রয়েছে এবং অন্যান্য সমস্ত পরিচিতি অবশ্যই জোড়ায় ব্যবহার করতে হবে (শুরু এবং বন্ধ করুন)।
দ্বিতীয় সাধারণ সার্কিটে ক্রমাগত ক্রিয়া সহ দুটি নিয়ন্ত্রণ যোগাযোগ রয়েছে: PD এবং OD (চিত্র 3, b)।
তৃতীয় সাধারণ সার্কিটে কম্পিউটারের স্টার্ট কন্টাক্ট এবং স্টপ কন্টাক্ট ওডি থাকে, কন্ট্রোল কন্টাক্ট ছাড়াও, এই সার্কিটে একটি ব্লকিং কনট্যাক্ট এক্স অন্তর্ভুক্ত করা উচিত, যার মাধ্যমে এক্সুয়েটর এক্স স্টার্ট কন্টাক্টের পরে পাওয়ার পেতে থাকবে। কম্পিউটার খোলা হয় (চিত্র 3, গ)।
চতুর্থ সাধারণ স্কিম দুটি স্বল্প-মেয়াদী পরিচিতির উপর ভিত্তি করে: একটি কম্পিউটার শুরু করুন এবং বন্ধ করুন ঠিক আছে, সমান্তরালভাবে সংযুক্ত (চিত্র 3, ডি)।
প্রদত্ত চারটি সাধারণ স্কিম (যেমন কিউব থেকে) পরিচিতি নিয়ন্ত্রণের জন্য জটিল সমান্তরাল-ক্রমিক স্কিম রচনা করার অনুমতি দেয়। সুতরাং, উদাহরণস্বরূপ, বিবেচনাধীন লিভার নিয়ন্ত্রণ স্কিম (চিত্র 1 দেখুন) চতুর্থ সাধারণ স্কিমের উপর ভিত্তি করে। এটি পুশ বোতাম SB1 স্বল্প-মেয়াদী স্টার্ট কন্টাক্ট হিসাবে এবং SQ লিমিট সুইচ স্বল্প-মেয়াদী স্টপ কন্টাক্ট হিসাবে ব্যবহার করে।
একটি স্বজ্ঞাত পদ্ধতি ব্যবহার করে একটি নিয়ন্ত্রণ স্কিম আঁকার সময়, নিয়ন্ত্রণ যোগাযোগের ধরনটি সঠিকভাবে নির্ধারণ করা প্রয়োজন, অর্থাৎ, এর কর্মের সময়কাল।
সাধারণ স্কিম ব্যবহার করে একটি স্বজ্ঞাত পদ্ধতি ব্যবহার করে একটি নিয়ন্ত্রণ স্কিম বিকাশের একটি উদাহরণ বিবেচনা করুন।
একটি সূচনাকারীকে নিয়ন্ত্রণ করার জন্য একটি আধা-স্বয়ংক্রিয় ডিভাইস এবং উচ্চ-ফ্রিকোয়েন্সি স্রোত সহ একটি পণ্য গরম করার জন্য ডিজাইন করা একটি ইনস্টলেশন স্প্রে করার জন্য একটি ডিভাইস বিকাশ করা প্রয়োজন এবং তারপরে এটিকে জলের জেট দিয়ে ঠান্ডা করা দরকার। ইন্ডাক্টরে পণ্য গরম করার সময় 12 সেকেন্ড এবং শীতল করার সময় 8 ঘন্টা। পণ্যটি ম্যানুয়ালি ইনডাক্টরে ইনস্টল করা হয়।
প্রথমত, আমরা আধা-স্বয়ংক্রিয় ডিভাইসের ক্রিয়াকলাপ বিশ্লেষণ করব এবং সমস্ত নির্বাহী এবং মধ্যবর্তী উপাদানগুলি নির্ধারণ করব। কর্মী ম্যানুয়ালি পণ্যটিকে ইন্ডাক্টরে ইনস্টল করে এবং স্টার্ট বোতাম টিপুন।এই মুহুর্তে, সূচনাকারী চালু হয় এবং পণ্য গরম করা শুরু হয়। একই সময়ে, গরম করার সময় (12 সেকেন্ড) বিবেচনায় নিয়ে টাইম রিলেটিও চালু করা উচিত।
এই সময় রিলে (আরো সঠিকভাবে, এর পরিচিতিগুলি) ইন্ডাক্টরটি বন্ধ করে এবং স্প্রিংকলার চালু করে, যা শীতল করার জন্য জল সরবরাহ করে। একই সময়ে, শীতল করার সময় গণনা করতে, অর্থাৎ স্প্রেয়ারটি বন্ধ করতে একটি দ্বিতীয় রিলে চালু করতে হবে। এইভাবে, চারটি উপাদান নিয়ন্ত্রণ করা প্রয়োজন: একটি সূচনাকারী, একটি স্প্রে ডিভাইস এবং দুটি সময় রিলে।
সূচনাকারী একটি কন্টাক্টরের মাধ্যমে চালু এবং বন্ধ করা হয়, এই কারণেই পরবর্তীটিকে নিয়ন্ত্রণ করা প্রয়োজন। স্প্রেয়ারটি একটি সোলেনয়েড ভালভ দ্বারা নিয়ন্ত্রিত হয়।
আসুন কন্টাক্টর KM1 এর কয়েল (কুণ্ডলী), সোলেনয়েড ভালভ KM2 এর কয়েল এবং সেই সময়ের রিলে KT1 এবং K.T2 এর কয়েল যথাক্রমে নির্ধারণ করি। সুতরাং, আমাদের দুটি অ্যাকুয়েটর রয়েছে: KM1 এবং KM2 এবং দুটি মধ্যবর্তী উপাদান: KT1 এবং KT2।
সম্পাদিত বিশ্লেষণ থেকে, এটি অনুসরণ করে যে হিটিংটি প্রথমে শুরু করা উচিত, অর্থাৎ, কুণ্ডলী KM1 উত্তেজিত হবে। SB ট্রিগার বোতাম (শর্ট অ্যাকশন) একটি স্টার্ট কন্টাক্ট হিসেবে ব্যবহার করা হয়। এইভাবে, হয় তৃতীয় বা চতুর্থ সাধারণ স্কিম প্রযোজ্য।
ইনডাক্টরটিকে টাইম রিলে KT1.1-এর পরিচিতি থেকে সংযোগ বিচ্ছিন্ন করা যাক, যা এই ক্ষেত্রে দীর্ঘ-অভিনয় পরিচিতি। অতএব, আমরা তৃতীয় সাধারণ স্কিম নির্বাচন করি। একই সাথে চৌম্বকীয় স্টার্টার KM1 এর উইন্ডিংয়ের সাথে, টাইম রিলে KT1 চালু করা প্রয়োজন, যা সমান্তরালভাবে তাদের সংযোগ করে করা খুব সহজ।
ফলাফল সার্কিটের অপারেশন বিবেচনা করুন (চিত্র 4, ক)।
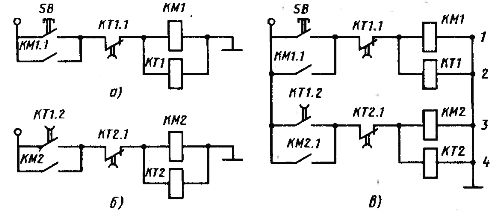
ভাত। 4.কন্ট্রোল সার্কিট: a — গরম করার সময় জন্য ইন্ডাক্টর এবং রিলে, b — স্প্রিংকলার ডিভাইস এবং রিলে কুলিং টাইম, c — সামগ্রিকভাবে ইনস্টলেশন
আপনি যখন স্টার্ট বোতাম SB টিপুন, তখন কন্টাক্টর KM1 এর কুণ্ডলীটি শক্তিপ্রাপ্ত হয়, অর্থাৎ, পণ্যটি গরম করা শুরু হয়। একই সময়ে, টাইম রিলে KT1 এর কয়েলটি শক্তিপ্রাপ্ত হয় এবং গরম করার সময় গণনা শুরু করে। ব্লকিং কন্টাক্ট KM1.1 এর সাহায্যে, ট্রিগার বোতাম SB রিলিজ করার পরেও KM1 কয়েলের ভোল্টেজ বজায় রাখা হবে, যেমন এর পরিচিতি খোলার পর।
গরম করার সময় শেষ হওয়ার পরে, সময় রিলে KT1 কাজ করবে, এর পরিচিতি KT1.1 খুলবে। এর ফলে KM1 কয়েল বন্ধ হয়ে যাবে (পণ্য গরম করা শেষ হবে)। স্প্রেয়ারটি এখন চালু করা উচিত। এটি পরিচিতি বন্ধ করে সময় রিলে KT1 দ্বারা চালু করা যেতে পারে। স্প্রেয়ার চালু হলে, টাইম রিলে KT1 বন্ধ হয়ে যায়। অতএব, বন্ধ পরিচিতি KT1.1 একটি স্বল্পমেয়াদী যোগাযোগ হবে। অতএব, আমরা আবার তৃতীয় সাধারণ স্কিম ব্যবহার করব।
একই সাথে স্প্রেয়ারের সাথে, টাইম রিলে KT2 চালু করা প্রয়োজন, যা শীতল করার সময় গণনা করে। এই উদ্দেশ্যে, আমরা প্রয়োগ করা কৌশল ব্যবহার করব এবং KM2 কয়েলের সমান্তরালে টাইম রিলে KT2-এর কয়েলটিকে সংযুক্ত করব। এইভাবে আমরা দ্বিতীয় নিয়ন্ত্রণ স্কিম পেতে (চিত্র 4, খ)। দুটি সার্কিট (চিত্র 4, a এবং b) একত্রিত করে, আমরা একটি সাধারণ নিয়ন্ত্রণ স্কিম পাই (চিত্র 4, c)।
আসুন এখন সার্কিটের ক্রিয়াকলাপটিকে সামগ্রিকভাবে বিবেচনা করি (চিত্র 4, গ)। আপনি যখন SB স্টার্ট বোতাম টিপুন, তখন কন্টাক্টর KM1 এবং টাইম রিলে KT1 এর কয়েলগুলি শক্তিপ্রাপ্ত হয় এবং পণ্যটি গরম হতে শুরু করে।12 সেকেন্ডের পরে, টাইম রিলে KT1 কাজ করবে এবং সার্কিট 1-এ এর পরিচিতিগুলি খুলবে এবং সার্কিট 2-এ বন্ধ হয়ে যাবে। পণ্য ঠান্ডা হতে শুরু করবে। একই সাথে সোলেনয়েড ভালভের কয়েল KM2 এর সাথে, টাইম রিলে K কে শক্তিযুক্ত করা হবে T2, শীতল করার সময় গণনা করে। যখন যোগাযোগ KT2.1 (সার্কিট 3) খোলে, ভালভ KM2 এবং টাইম রিলে KT2 বন্ধ হয়ে যায়, এবং সার্কিট তার আসল অবস্থানে ফিরে আসে।
ফলস্বরূপ সূচনাকারী এবং স্প্রিংকলার নিয়ন্ত্রণ স্কিমটি একটি স্বজ্ঞাত পদ্ধতি ব্যবহার করে তৈরি করা হয়েছিল। যাইহোক, এই স্কিমটি সঠিক এবং সর্বোত্তম হবে এমন কোন প্রমাণ নেই। সার্কিটের অপারেবিলিটির প্রশ্ন শুধুমাত্র এর উৎপাদন এবং সতর্ক পরীক্ষামূলক যাচাইয়ের পরেই সমাধান করা যেতে পারে। এটি অবিকল স্বজ্ঞাত পদ্ধতির সবচেয়ে বড় অপূর্ণতা। বিশ্লেষণাত্মক পদ্ধতিতে উল্লেখিত ত্রুটি অনুপস্থিত। নিয়ন্ত্রণ স্কিম বিকাশের জন্য বিশ্লেষণাত্মক পদ্ধতি পরবর্তী নিবন্ধে আলোচনা করা হবে।